
Бесплатный фрагмент - Законы и закономерности развития систем
Книга 4

Петров В.
Законы и закономерности развития систем. ТРИЗ. Книга 4. Законы эволюции систем. Часть 2. Закономерность изменения степени управляемости и динамичности. Прогнозирование. Тель-Авив, 2020.
Впервые монография была издана в 2013 году. Позже была издана книга «Законы развития систем». Данное издание переработанное и дополненное.
Это четвертая книга из монографии законы и закономерности развития систем. Практически — это вторая часть книги 3. Книга включает закономерность изменения степени управляемости и динамичности, а также прогнозирование развития систем.
Монография содержит 4 книги. Это единственное самое полное изложение законов и закономерностей развития систем. С такой подробностью законы и закономерности развития систем еще не были изложены ни в одной книге. Монография также содержит методику прогнозирования — это основа эффективной методики получения перспективных идей, прогноза развития систем и обхода конкурирующих патентов, которая имеет ощутимые преимущества перед существующими подходами.
Монография предназначена для широкого круга читателей, интересующихся или занимающихся инновациями. В первую очередь она предназначена научным работникам, инженерам и изобретателям, решающим творческие задачи. Она может быть полезна преподавателям университетов, аспирантам и студентам, изучающим теорию решения изобретательских задач (ТРИЗ), инженерное творчество, системный подход и инновационный процесс, а также руководителям предприятий и бизнесменам.
Особый интерес книга может представлять для патентных поверенных.
Глава 22. Закономерность изменения степени управляемости и динамичности
…динамизация — универсальный закон, определяющий направление развития всех технических систем, даже таких, которые по самой своей природе, казалось бы, должны оставаться жесткими.
Г. С. Альтшуллер
22.1. Общие понятия
Закономерность изменения степени управляемости и динамичности является основной из закономерностей эволюции систем (рис. 22.1
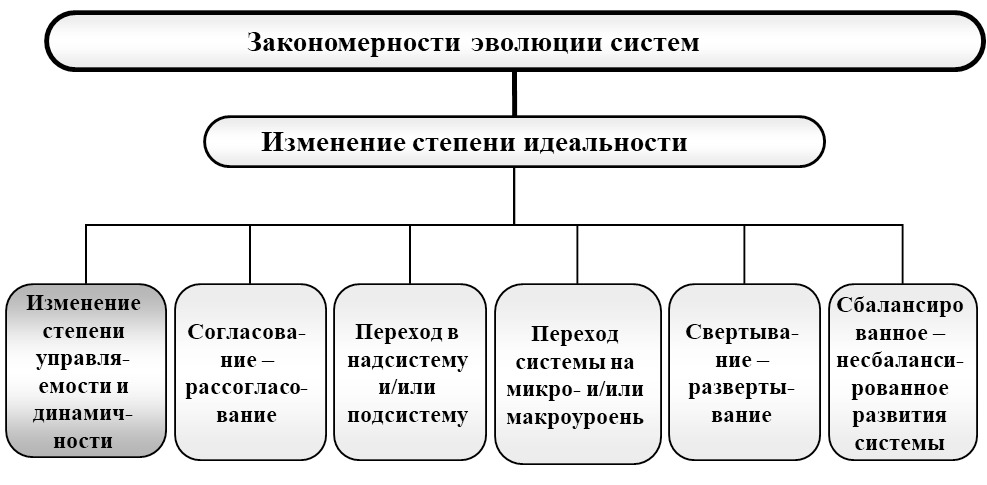
Эта закономерность содержит две тенденции: увеличения и уменьшения управляемости и динамичности (рис. 22.2).
Основная из этих тенденций — это увеличение управляемости и динамичности. Вторая тенденция — вспомогательная. Особенности их применения будут изложены ниже.
Эта закономерность имеет подзакономерности — закономерность изменения степени вепольности и закономерность изменения управляемости веществом, энергией и информацией (рис. 22.3).
Как уже говорилось, эта закономерность содержит две тенденции: увеличения и уменьшения управляемости и динамичности.
Основная из этих тенденций — это увеличение управляемости и динамичности. Вторая тенденция — вспомогательная. Особенности их применения будут изложены ниже.
Увеличение управляемости и динамичности — две взаимосвязанные тенденции, позволяющие увеличить степень идеальности системы.
• Более идеальная система должна быть более управляемой и более динамичной.
• Более управляемая система должна быть более динамичной.
• Динамичная система может приспосабливаться к внешним и внутренним изменениям, меняя свои параметры, структуру и функции:
— в пространстве;
— во времени;
— по условию.
Закономерность увеличения степени управляемости и динамичности заключается в том, что любая система в своем развитии стремится стать более управляемой и боле динамичной, т. е. система должна повышать свою степень управляемости и динамичности.
22.2. Закономерность увеличения степени управляемости
22.2.1. Общая тенденция
Развитие системы идет в направлении увеличения степени управляемости.
Система может быть управляемой тогда и только тогда, когда она содержит в себе элементы способные воспринимать управляющие сигналы, преобразовывать их в управляющие воздействия и адекватно воспринимать информацию о внутренних изменениях в системе и внешних воздействиях на нее. Это свойство часто называют отзывчивостью.
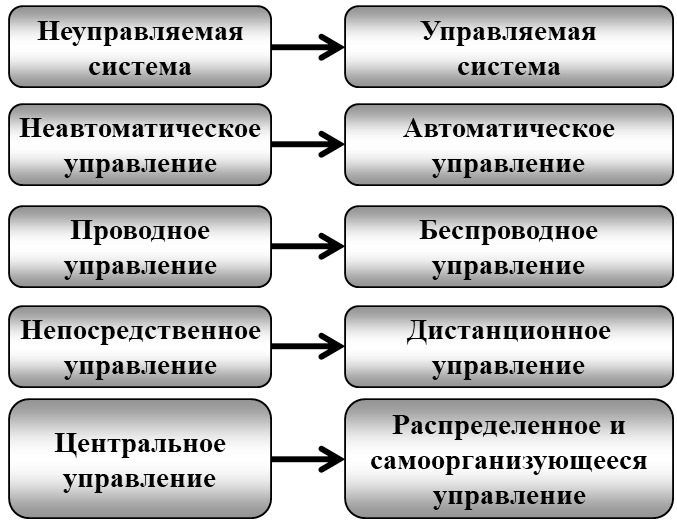
Общая тенденция увеличения степени управляемости (рис. 22.4) — переход:
— от неуправляемой к управляемой системе;
— неавтоматического (ручного) управления к автоматическому;
— проводного управления к беспроводному;
— непосредственного управления к дистанционному;
— от центрального управления к распределенному и самоорганизующемуся управлению (сетевому управлению).
22.2.2. Неуправляемая система
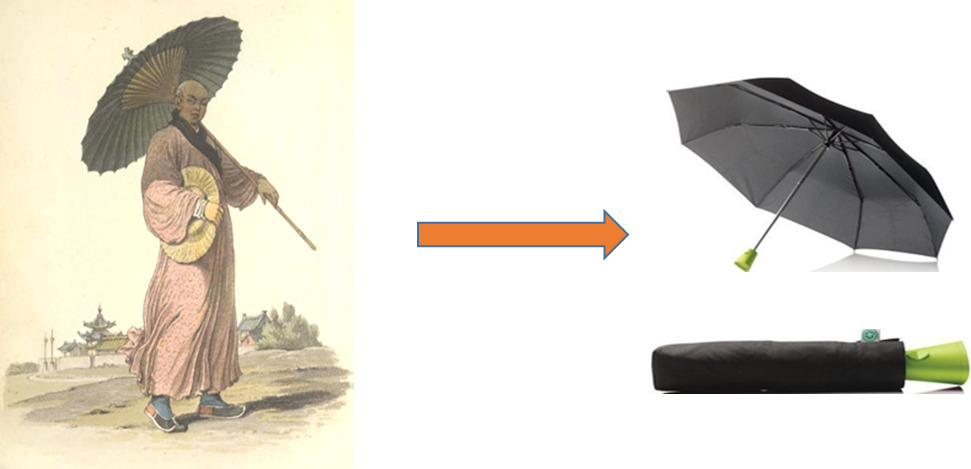
Пример 22.1. Зонт
Считается, что первые зонты появились более 1 тыс. лет до нашей эры в Китае, Индии или Египте. Они защищали от солнца. Их использовали только фараоны, императоры или знать. Первые модели были сделаны из перьев или листьев лотоса, прикрепленных к палке. Далее раму делали из тростника или сандалового дерева и покрывали кожей, тканями или шелком. Более простые зонты делали из плотной бумаги. Такие зонты были 1,5 метра высотой и весили 2 кг. Они не складывались, т. е. были неуправляемые. Первые зонты имели один недостаток — они не были складными, т. е. имели только одно устойчивое состояние — открытое. Соответственно, это была неуправляемая система — независимо от наличия дождя или прямых солнечных лучей зонтик сохранял свои внушительные размеры.
Далее зонты слали складываться, но имели длинную ручку — это переход к управляемым зонтам. Далее степень управляемости зонтом увеличивалась.
Зонты стали использоваться и для защиты от дождя. Появился зонт-трость.
В 1928 году Ханс Хаупт изобрел карманный зонт.
В 1969 году БрэдФиллипс (Bradford E Phillips) владелец компании Totes Incorporated из Лавленда, штат Огайо, получил патент на свой «рабочий складной зонт».
Это был следующий шаг в увеличении управляемости зонтом — он автоматически раскладывался.
Пример 22.2. Фотоаппарат
Первые фотоаппараты имели ручное управление. С появлением электроники некоторые операции были автоматизированы. Полный переход к автоматизированному управлению произошел с появлением цифровых камер. Сегодня цифровая камера имеется в любом смартфоне или планшете.
Это пример перехода от неавтоматического к автоматическому управлению.

Пример 22.3. Телевизор
Сначала телевизором управляли с помощью ручек, которые находились непосредственно на телевизоре.
На следующем этапе сделали выносной пульт управления, соединенный кабелем с телевизором.
Далее стали использовать беспроводной пульт управления.
Это пример перехода от проводного к беспроводному управлению.
Управление телевизором с помощью ручек или кнопок к управлению с помощью пульта — это переход от непосредственного к дистанционному вправлению.
Пример 22.4. Распределенное управление
В природе имеется много примеров распределенного, самоорганизующегося управления.
Стаи птиц перемещаются в воздухе образую очень красивые фигуры (рис. 22.7). Подобную картину можно наблюдать у косяков рыб (рис. 22.8). Тысячи птиц или рыб движутся и никогда не сталкиваются друг с другом.
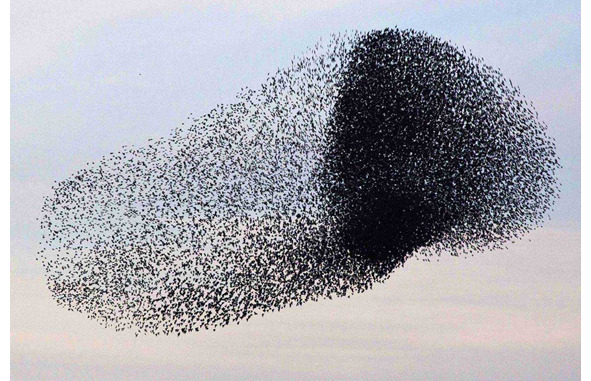

Это же наблюдается со стадами животных (рис. 22.9).

Толка людей тоже подчиняется этой закономерности.
Это примеры сетевого управления.
В технических системах в основном использовалось центральное управление.
Пример 22.5. Сетевое управление
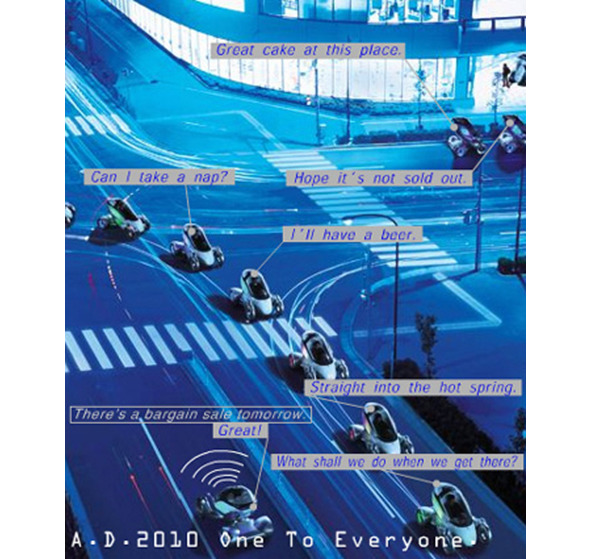
На автомобильной выставке в Токио в 2003 году была показана концепция автомобиля Toyota Personal Mobility — Toyota PM (рис. 22.10).
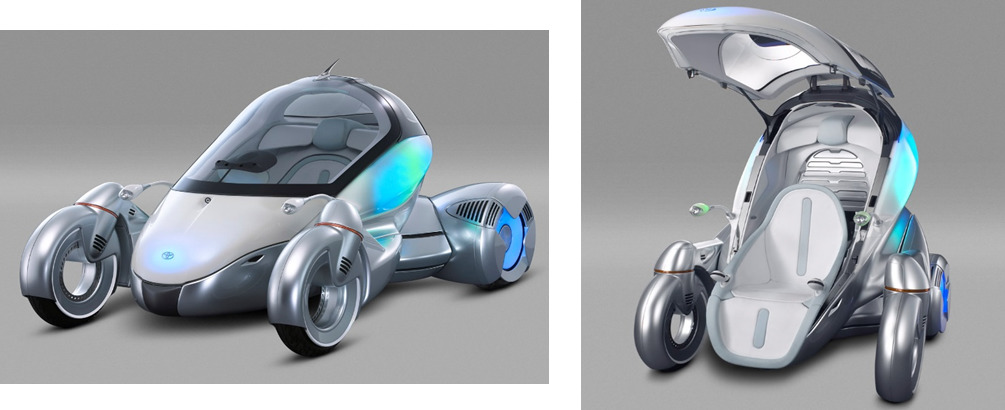
Предусматривалось, что к 2010 году будут иметь сетевое управление (рис. 22.11). Однако к этому времени стали развиваться более прогрессивные технологии. Теперь имеются проекты сетевого управления транспортом с помощью 5 G технологии (рис. 22.12).

Уже создано сетевое управление мини-спутниками (рис. 22.13).
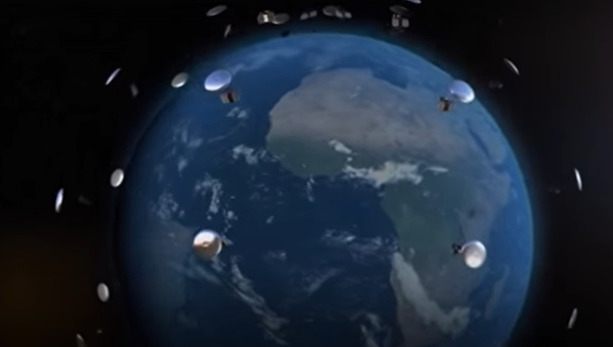
Это были примеры перехода от центрального к распределенному, самоорганизующееся управления — сетевому управлению.
Закономерность увеличения степени управляемости также называют закономерностью вытеснения человека из системы, так как увеличение управляемости системы уменьшает степень участия человека в работе системы.
Раньше мы рассматривали следствия этой закономерности при рассмотрении степеней идеализации:
· система появляется в нужный момент в нужном месте, по необходимому условию;
· система все делает сама — самоисполнение (рис. 22.14):
— механизация;
— автоматизация;
— кибернетизация (интеллектуализация).

Тенденцию самоисполнения еще называют уменьшение участия человека в работе системы.
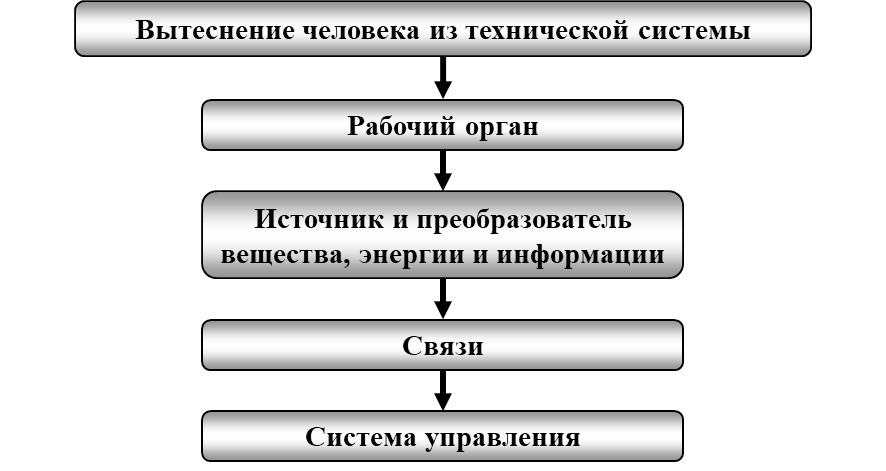
Сначала человека заменяют на уровне рабочего органа, затем на уровне источника и преобразователя вещества, энергии и информации, далее на уровне связей и наконец, на уровне системы управления, к которым относятся автоматизация и кибернетизация (рис. 22.15).
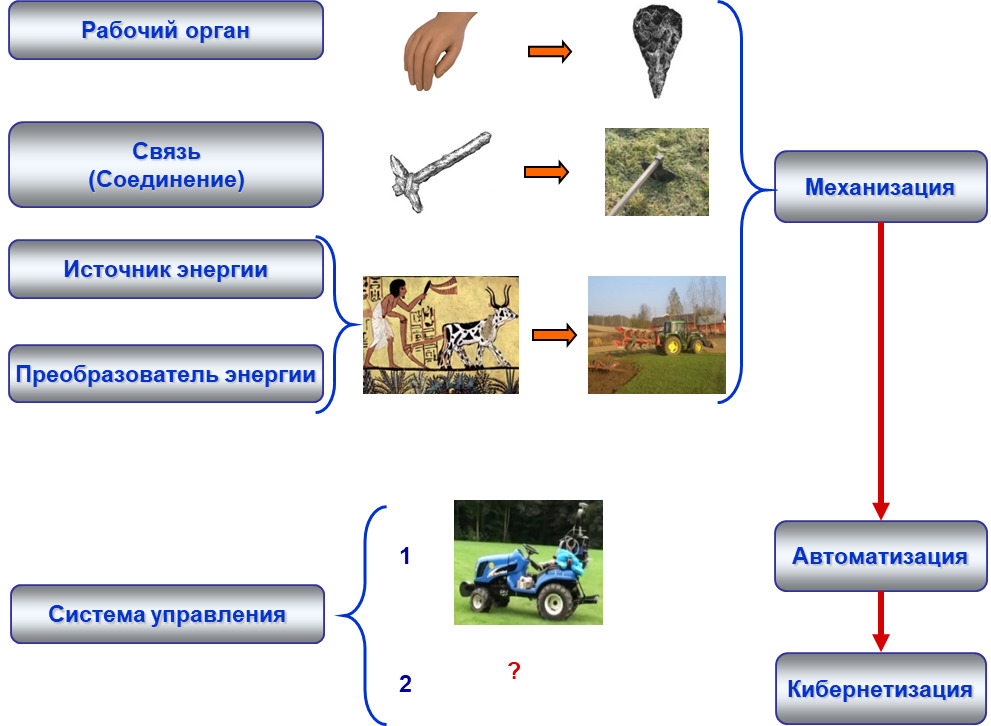
Пример 22.6. Обработка земли
Сначала первобытный человек копал землю ногтями, затем взял заостренный камень — это замена человека в виде рабочего органа. Ногти заменили камнем.
В дальнейшем камень привязали к палке. Замена на уровне связей (трансмиссии). Инструмент копания усовершенствовался.
Далее человек стал использовать животных как источник и преобразователь энергии. Источник и преобразователь энергии совершенствовался — стали использовать трактор. Управление трактором выполнял человек.
Имеются попытки создать автоматизированный трактор. Он передвигается по программе и использует GPS. Это период автоматизации. Замена человека на уровне системы управления. Программу пишет и вводит в машину человек.
Следующим этапом — программа создается и изменяется программой. Трактор будет самостоятельно знать, когда и что необходимо сеять, и собирать плоды. Все процессы будут происходить без участия человека. Это этап кибернетизации (интеллектуализации).
22.2.3. Управляемая система
Автоматическое управление в технике — совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления.
Цель управления — это изменение выходной величины управляемого объекта.
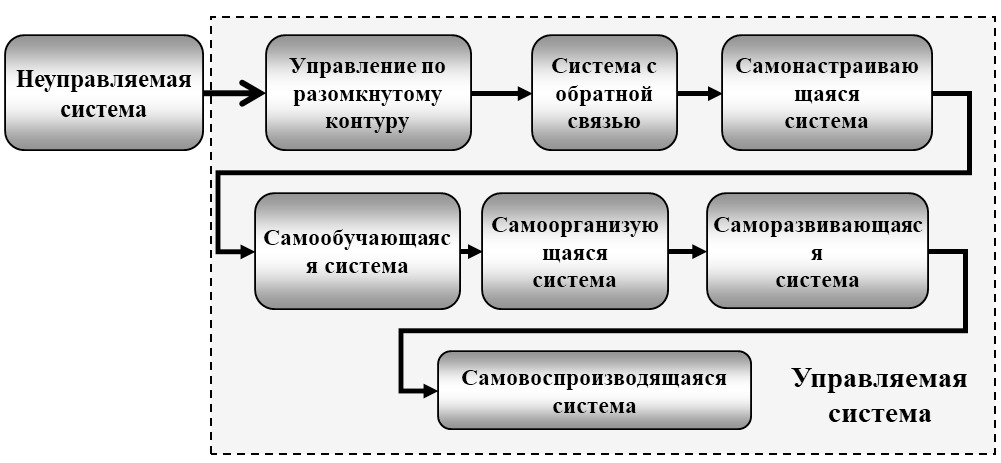
Тенденция перехода от неуправляемой к управляемой системе показана на рис. 22.17. Она представляет собой:
Переход от неуправляемой системы к управлению по разомкнутому контуру, затем к переходу к системе с обратной связью, к адаптивной (самонастраивающейся) системе, к самообучаемой и самоорганизующейся системе и, наконец, к саморазвивающейся и самовоспроизводящей системе.
Управление по разомкнутому контуру осуществляется без знаний о текущем состоянии об управляемом объекте. При таком управлении чаще всего управление ведется по жесткой программе, без анализа каких-либо факторов в процессе работы, либо измеряют и компенсируют главные из возмущений.
Для этого вида управления характерно отсутствие обратной связи, с помощью которой можно получить информацию о том, что происходит в объекте управления.
Структурная схема системы управления по разомкнутому контуру показана на рис. 22.18. Устройство управления воздействует на объект управления по программе, находящейся в задающем устройстве. На объект управления могут воздействовать возмущения. Некоторые системы по разомкнутому циклу измеряют главные из возмущений и компенсируются.
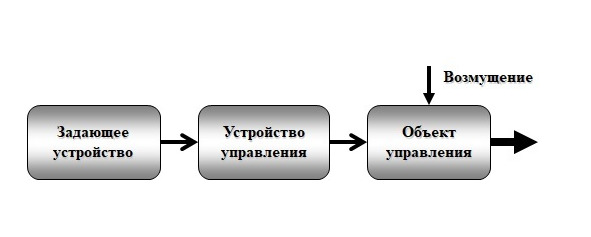
Этот вид управления достаточно примитивен, но часто исполнительные устройства просты, надежны и дешевы. По такому принципу работают примитивные автоматы и конвейерные линии.
Условия предпочтения управления по разомкнутому контуру управлению по замкнутому контуру:
— не нужны высокоточные операции;
— система может работать удовлетворительно без гарантии изменений, которые происходят в объекте управления.
Приведем примеры систем, работающих по разомкнутому циклу.
Пример 22.7. Стиральная машина
Переключение команд в стиральной машине осуществляется по определенной программе.
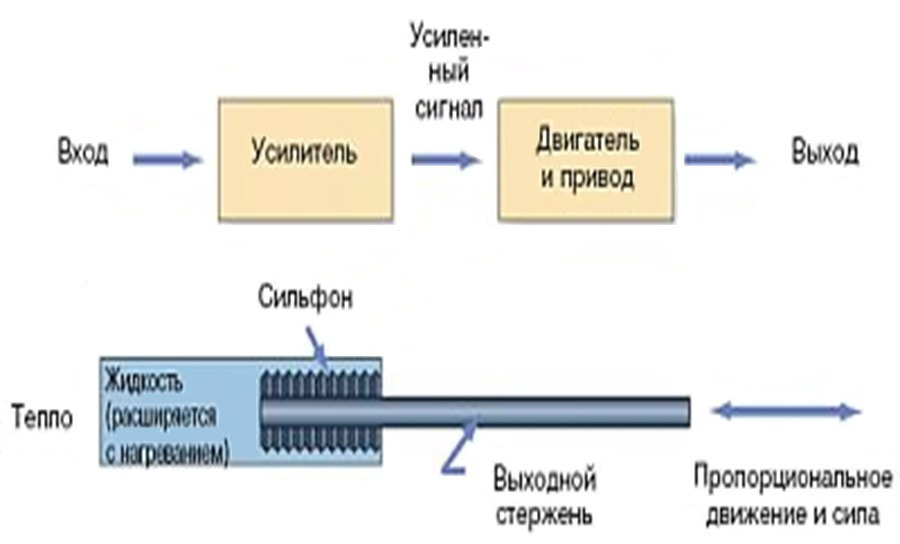
Пример 22.8. Сильфон
В сильфоне (рис. 22.19), заполненном жидкостью, входным сигналом является теплота. Жидкость и окружающая ее оболочка вместе с сильфоном представляют собой датчик и усилитель.
Выход системы — это стержень или подвижный рычаг.
Существенным для этой системы является довольно высокие значения движущей силы и длинный ход, который можно получить на выходе: обычный показатель — от полу килограмма до нескольких килограммов в зависимости от размера сильфона. А ход может изменяться в диапазоне от миллиметров до нескольких сантиметров. По сути, это практичный вариант исполнительного устройства с прямым линейным приводом без двигателей или электроэнергии.
Сравнивая схему управления и устройство системы, наглядно видно, что сильфон является физическим представлением системы управления по разомкнутому контуру.
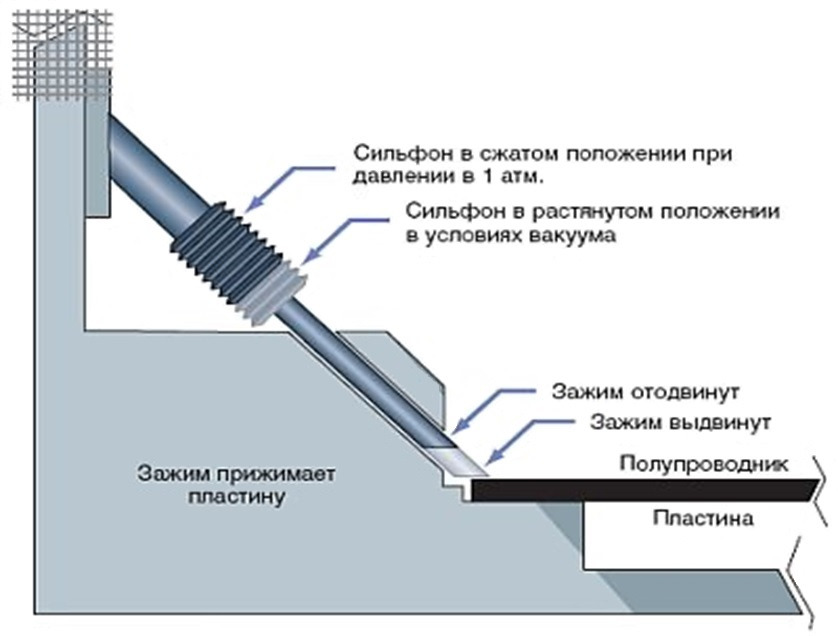
Пример 22.9. Система прижатия полупроводниковой пластины
Для прижатия полупроводниковой пластины во время обработки используют сильфон (рис. 22.20). Он растягивается и сжимается по мере изменения давления, находясь в одном из двух состояний — сжатом или растянутом. Обработка пластины ведется в вакууме, сильфон растягивается, выдвигая зажим, который прижимает пластину. Когда камера открывается, в ней оказывается атмосферное давление, сильфон сжимается, отодвигая зажим и высвобождая пластину.
Это система работает по разомкнутому контуру. В ней нет обратной связи, чтобы удостовериться, что зажим был приведен в действие. Исключена необходимость размещения внутри камеры датчиков, приводов и устройства вывода из нее подводов. Система проста и надежна.
Вид систем, где предпочтительно использовать управление по разомкнутому контуру:
— чаще всего механические системы;
— системы, допускающие их корректировку оператором для компенсации ошибок;
— системы, предназначенные для работы продолжительное время с минимальным вниманием оператора;
— системы, не требующие повторной калибровки;
— системы, простые по функциям и в конструкции системы, в которых отдельные компоненты выполняют многочисленные задачи;
— системы, непрерывно работающие даже без необходимости;
— системы, в которых стоимость важнее точности.
Система с обратной связью представляет собой систему, работающую по замкнутому контуру. В такой системе осуществляется регулирование по отклонению, а цепь прохождения сигналов образует замкнутый контур, включающий объект управления и управляющее устройство.
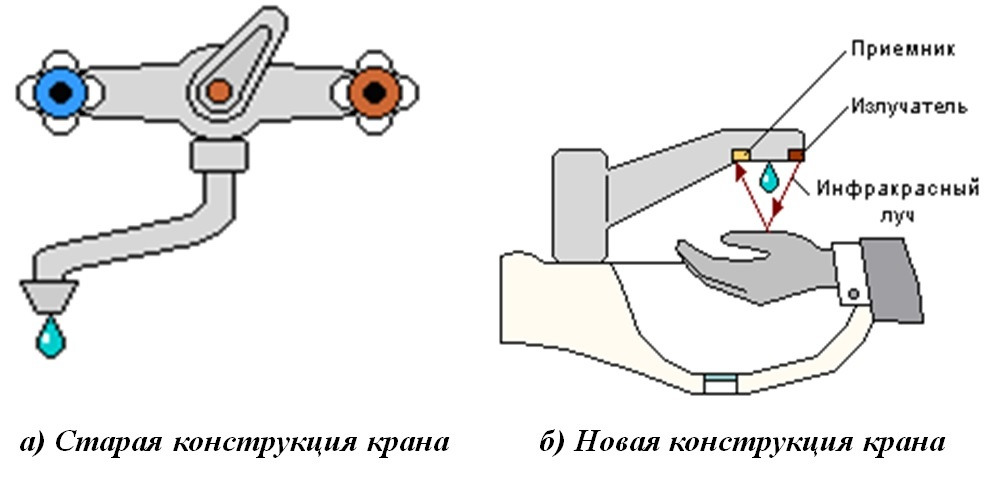
Пример 22.10. Водопроводный кран
При мытье рук сначала включают кран, а потом используют мыло. Во время мытья расходуется много лишней воды. Как сократить расходы?
Существуют системы, выдающие определенную порцию воды, — это управление по разомкнутому циклу.
Выпускается водопроводный кран, в нижней части которого имеются излучатель и приемник инфракрасного излучения. При поднесении рук под кран включается вода
(рис. 22.21). Когда руки убираются из-под крана — вода выключается. Такой кран сберегает много воды и окупается в течение шести месяцев. Это пример системы с обратной связью.
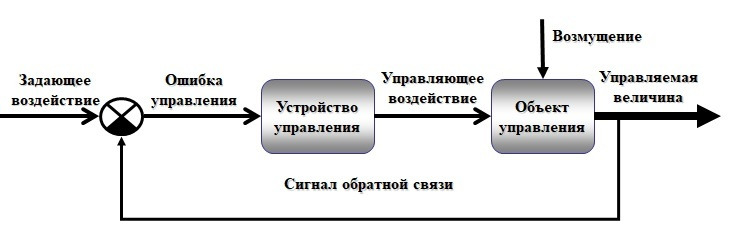
Структурная схема системы управления с обратной связью показана на рис. 22.22. Устройство управления воздействует на объект управления посредством сигнала (управляющего воздействия) в соответствии с ошибкой управления, которая вырабатывается в результате сравнения сигнала обратной связи с задающим воздействием. На объект управления могут воздействовать возмущения.

Обратная связь — это процесс, приводящий к тому, что результат функционирования какой-либо системы влияет на параметры, от которых зависит функционирование этой системы. На вход системы подается сигнал, являющийся функцией выходного сигнала. Часто это делается преднамеренно, чтобы повлиять на динамику функционирования системы.
Различают положительную и отрицательную обратную связь.
Отрицательная обратная связь — это тип обратной связи, при которой входной сигнал системы изменяет таким образом, чтобы противодействовать изменению выходного сигнала. Отрицательная обратная связь компенсирует отклонения управляемой величины от желаемых значений вне зависимости от причин, вызвавших эти отклонения. Таким образом, на вход системы подается инвертируемый выходной сигнал, сигналы вычитаются, уменьшая ошибку управления.
Отрицательная обратная связь делает систему более устойчивой к случайному изменению параметров.
На рис. 22.23 затемненная часть сумматора обозначает, что он является инвертором (сигнал вычитается).
Примером отрицательной обратной связи является любая система автоматического управления и регулирования, следящая система.
Пример 22.11. Инвертор
Простейший пример отрицательной обратной связи — это инвертор или инвертирующий усилитель (рис. 22.24). Он выполнен на операционном усилителе (ОУ). Обратная связь подается через сопротивление R3 на инвертирующий вход (он обозначается кружочком), при этом фаза выходного сигнала сдвигается относительно входного на 180º, поэтому обратная связь отрицательная.
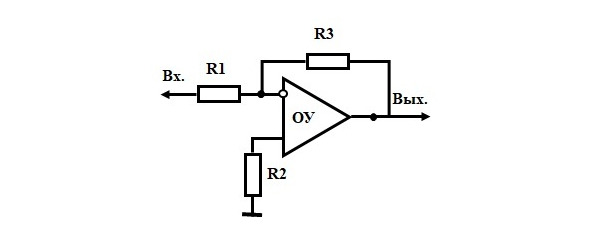
ОУ — операционный усилитель, R1, R2, R3 — сопротивления
Пример 22.12. Автопилот
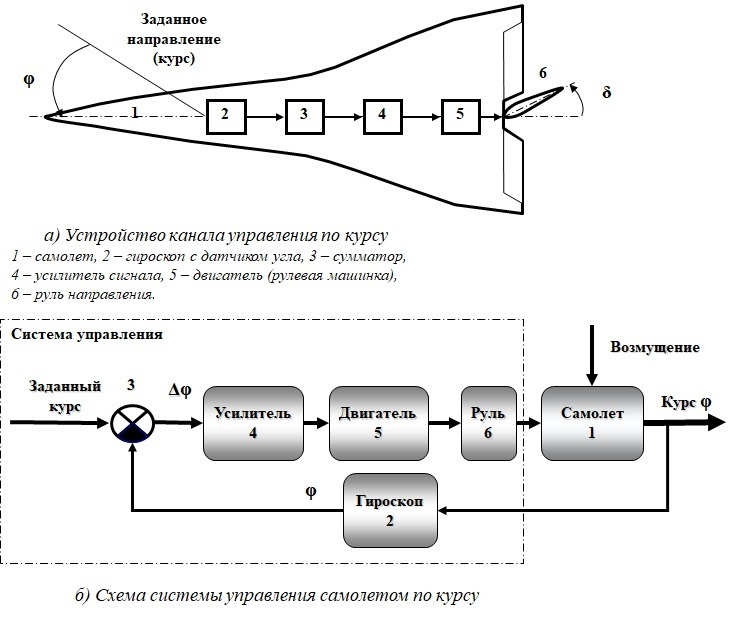
Автопилот предназначен для автоматического управления самолетом в пространстве. Он содержит практически идентичные каналы управления по направлению (курсу) в горизонтальной плоскости, по крену (повороту вокруг продольной оси), тангажу (движение в вертикальной плоскости — повороты с носа на корму) и высоте. Рассмотрим канал управления по курсу.
Устройство канала управления самолетом по курсу изображено на рис. 22.25а.
Схема системы управления представлена на рис. 22.25б.
Объектом управления является корпус самолета (1). Сигнал о текущем направлении самолета получают с датчика направления. Обычно для этого используют гироскоп (2), который сохраняет неизменное положение в пространстве. Сигнал разности между текущим положением самолета и показаниями гироскопа подается на суммирующее устройство (3), где происходит сравнение данного сигнала с заданным направлением, соответствующим режиму полета. Разница между этими сигналами (рассогласование) усиливается (4) и поступает на исполнительное устройство (5) (двигатель), которое поворачивает руль направления (6), а он разворачивает самолет.
Пример 22.13. Терморегуляция
Повышение (или понижение) температуры тела человека регистрируется терморецепторами в коже и гипоталамусе, вызывая в мозгу сигнал отрицательной обратной связи, вызывающий понижение (или повышение) температуры.
Эффективность управления повышается, если управление осуществляется не только по управляемой величине, но и по ее производным и интегралу.
Производная позволяет раньше реагировать на изменение управляемой величины, а интеграл позволяет учесть предыдущие изменения.
Положительная обратная связь — это тип обратной связи, при которой изменение выходного сигнала системы усиливается за счет складывания с входным сигналом, способствуя дальнейшему отклонению выходного сигнала от первоначального значения.
Системы с сильной положительной обратной связью неустойчивы, в них возникают незатухающие колебания (автоколебания).
Положительная обратная связь используется, например, в усилителях, генераторах, переключателях и т. п.
Пример 22.14. Генератор
Простейший пример положительной обратной связи — это генератор. На схеме (рис. 22.26) генератор выполнен на операционном усилителе (ОУ). Обратная связь подается через сопротивление R3 на положительный вход, при этом входной и выходной сигналы складываются, усиливая выходной сигнал. Поэтому обратная связь положительная.
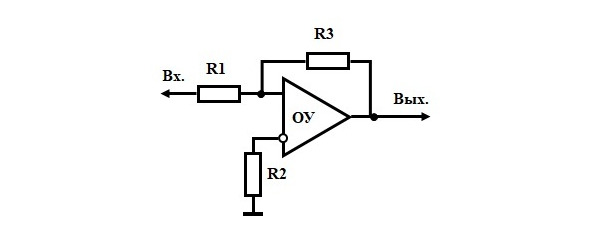
ОУ — операционный усилитель, R1, R2, R3 — сопротивления
Пример 22.15. Возбуждение
Реакция возбуждения нервной системы является примером положительной обратной связи. Если не срабатывает отрицательная обратная связь, то организм перевозбуждается, что может привести к болезням или летальному исходу.
Вместе с тем положительная обратная связь выводит организм из застоя — переводит его на новый уровень, например, помогает в творчестве.
Пример 22.16. Инфляционные ожидания
В качестве примера положительной обратной связи рассмотрим проблему инфляционных ожиданий. Рост инфляционных ожиданий вынуждает людей делать больше покупок, чем необходимо. Увеличение спроса приводит к росту цен и усиливает инфляцию, что в свою очередь способствует повышению инфляционных ожиданий.
Самонастраивающаяся система — это система, в которой приспособление к случайно изменяющимся условиям обеспечивается автоматическим изменением параметров настройки или путем автоматического поиска оптимальной настройки. Самонастраивающуюся систему также называют адаптивной или самоприспосабливающейся.
В самонастраивающихся системах параметры меняются в более широком диапазоне по сравнению с обычными (не самонастраивающимися) системами, в которых осуществляется первоначальная настройка (создание определенных параметров) при разработке системы. Такие параметры влияют на устойчивость и качество процессов управления. Если эти параметры остаются неизменными, а условия функционирования (характеристики управляемого объекта, возмущающие воздействия) существенно изменяются, то процесс управления может ухудшиться или даже стать неустойчивым. Ручная настройка системы часто оказывается обременительной, а иногда и невозможной. Использование в таких случаях самонастраивающейся системы технически и экономически целесообразно и даже может оказаться единственным способом надежного управления.
Самонастраивающаяся система сохраняет работоспособность даже в условиях непредвиденного изменения свойств управляемого объекта, цели управления или условий окружающей среды посредством смены алгоритмов своего функционирования или поиска оптимальных состояний.
Развитой адаптивной способностью обладают все живые организмы.
Пример 22.17. Коммутатор
Коммутаторы предназначены для подключения и отключения входных сигналов. Они широко используются в серверах, чтобы повысить производительность пропускания каждого из каналов (портов). Каждый из портов имеет определенную скорость пропускания информации, что ограничивает общую производительность ее прохождения.
Компания IBM разработала коммутатор с самонастраивающимися портами, способными автоматически выбирать наибольшую скорость пропускания информации без блокировки каналов.
Пример 22.18. «Умные» кроссовки
Компания Adidas создала кроссовки снабженными микропроцессорами, датчиками и микромотором (рис. 22.27). Кроссовок адаптируется под почву, меняя амортизационные характеристики подметки. Кроссовки сами приспосабливаются к габаритам бегуна и длине его шага, выбирают оптимальную упругость для любого покрытия — от твердого до пересеченной местности и от сухих улиц до влажного океанского берега. Вес кроссовок составляет 400 г, из которых на «электронно-мозговую» часть приходится всего 40 г. Через каждые 100 ч необходимо менять батарейку.

Самообучающаяся система — это система, алгоритм функционирования которой совершенствуется путем самообучения в процессе работы, улучшая функционирование системы.
Пример 22.19. Выявление подозрительного поведения
Ученые американского университета штата Огайо разрабатывают систему, которая сможет автоматически выявлять факты подозрительного поведения людей на улицах.
Самообучающаяся система сможет распознавать в видеопотоке странные действия людей и машин, отслеживать выбранные объекты и при необходимости информировать полицию или скорую помощь.
На протяжении нескольких месяцев она накапливает сведения о типовых маршрутах передвижения по контролируемой улице и способна, например, отличать граждан, спешащих на работу, от заблудившихся подростков.
Пример 22.20. Поисковые системы
Информацию в Интернете ищут с помощью специальных поисковых систем, например, поисковой машины Google, которая обрабатывает в месяц более 40 млрд запросов. Программа поисковой машины самостоятельно изучает запросы и впоследствии предоставляет клиентам информацию, более подходящую для каждого из них. Например, предоставляет информацию, к которой чаще всего обращаются.
Самоорганизующаяся система — это система, которая способна синтезировать модель структуры системы в зависимости от ее предназначения и окружающих ее условий. Она разрабатывает алгоритм работы системы, проектируя систему управления, и по синтезируемой модели создает саму систему из имеющихся элементов. Такая система способна перестроить структуру системы, чтобы приспособиться к внутренним или внешним изменениям.
В простейшем случае система способна изменить связи между подсистемами, а в сложнейшем случае заменять, добавлять или изменять подсистемы для создания структуры, способной наилучшим образом выполнить необходимые функции.
Основное отличие самоорганизующейся системы от самонастраивающейся системы заключается в том, что в первой в процессе приспособления преобладают качественные изменения, а во второй — количественные.
Пример 22.21. Самоорганизующийся робот
В лаборатории вычислительного синтеза Корнельского университета (США) разработали опытный образец робота (рис. 22.28), способного синтезировать свою структуру в зависимости от окружающих его условий и обстоятельств и воспроизвести себя из универсальных элементов — кубиков (рис. 22.28а).
На поверхности кубиков имеются электромагниты, с помощью которых они могут соединяться и разъединяться друг с другом; питание подводится через контакты на поверхности монтажного стола.
Каждый куб разделен пополам по диагонали на две части, которые способны вращаться относительно друг друга. При этом робот, составленный из множества кубиков, воспроизводит сам себя. Так, трехмодульный робот способен воспроизвести себя в течение одной минуты.
Процесс происходит так. Робот изгибается, ставит свой собственный куб на стол и надстраивает его новым кубом, который подают люди. При этом новый робот помогает в комплектации его собственной конструкции.

Первоначально робот создает свою модель и по ней синтезирует систему управления, что осуществляется в результате ограниченного количества физических экспериментов (это поисковая самонастраивающаяся система).
Алгоритм работы робота позволяет ему функционально компенсировать механические повреждения в результате коррекции собственной модели.
Саморазвивающаяся система — это самообучающаяся система, способная не только накапливать знания, но и развивать себя в соответствии с поставленными целями.
Пример 22.22. Саморазвивающаяся компьютерная система
В патенте США 5 072 406 описана саморазвивающаяся компьютерная система, память которой содержит блоки инструкций, специальных знаний и базовых данных. Блок специальных знаний включают знания конкретной области и стратегию их использования. Блок базовых данных включает знания по использованию инструкций.
При поступлении входного сигнала он обрабатывается и перепроверяется по всем блокам с учетом имеющихся инструкций и базовых данных, вырабатывая выходной сигнал. При выявлении новых знаний они заносятся в блок специальных знаний. В процессе деятельности блок специальных знаний может изменять инструкции, постоянно развивая компьютерную систему.
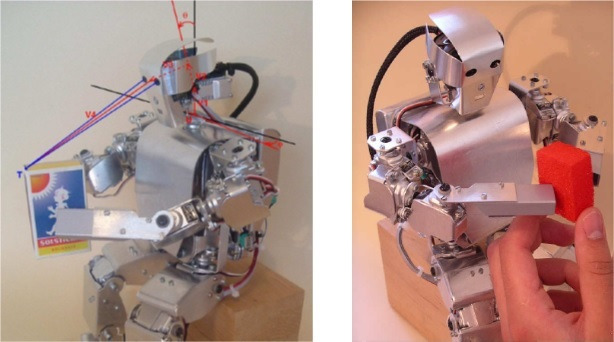
Пример 22.23. Саморазвивающийся робот
В швейцарском университете Чалмер (Chalmers) создали робот HR-2 (рис. 22.29). Он обладает 22 степенями свободы, что позволяет ему легко перемещаться и копировать движения человека. Робот имеет объемное зрение, делая возможным координировать движения рук. Он повторяет показанные ему движения рук. Искусственный мозг обладает развитой нейронной сетью. Робот способен различать лица людей и говорить. Он самообучается и саморазвивается.
Самовоспроизводящаяся система — это самоорганизующаяся, саморазвивающаяся система, способная создать подобную себе систему.
Основное отличие самовоспроизводящейся системы от самоорганизующейся заключается в том, что в первой используются готовые подсистемы, а во второй — их изготовляет сама система.
Самовоспроизводящиеся системы, прежде всего, характерны для живых организмов. Клетка сама себя воспроизводит. Немалую роль в этом играют стволовые клетки.
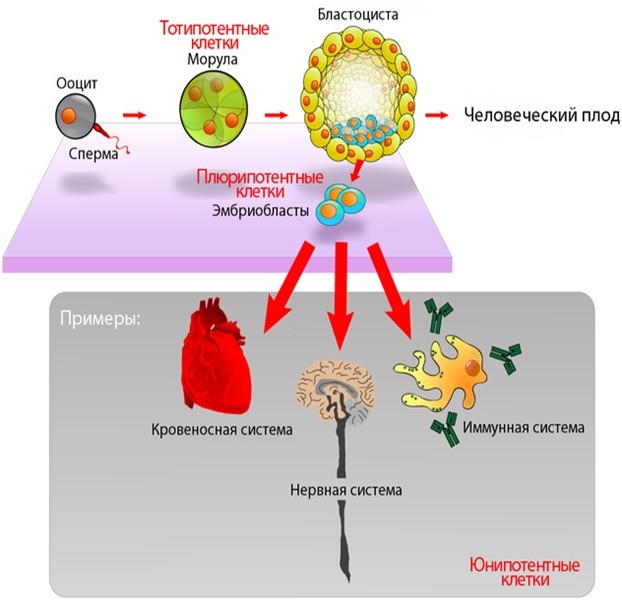
Пример 22.24. Стволовая клетка
Стволовые клетки — это особые клетки живых организмов (клетки-родоначальницы), каждая из которых способна впоследствии изменяться (дифференцироваться) особым образом (т. е. получать специализацию и далее развиваться как обычная клетка). Стволовые клетки могут давать начало любым клеткам организма: кожным, нервным, клеткам крови и т. д.
Они способны асимметрично делиться, из-за чего при делении образуется клетка, подобная материнской (самовоспроизведение), а также новая клетка, которая способна дифференцироваться.
Иерархия стволовых клеток показана на рис. 22.30.
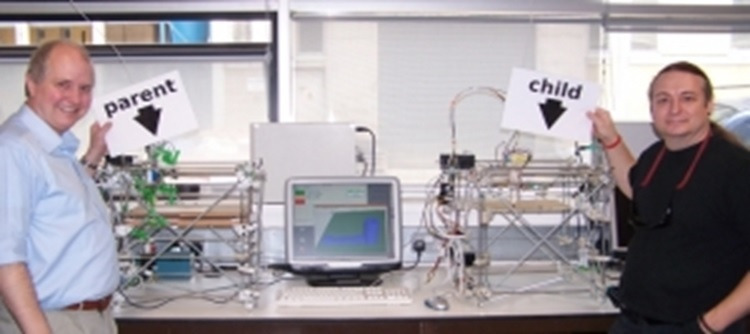
Пример 22.25. Самовоспроизводящаяся машина
Доктор Adrian Bowyer из университета Ванны в Великобритании разработал машину RedRap (Replicating Rapid-prototyper), которая 29 мая 2008 г. в 14:00 воспроизвела свою копию (рис. 22.31). Пластмассовые детали для этой машины изготовлялись на 3D-принтере, встроенном в машину.
22.3. Уменьшение степени управляемости
Закономерность уменьшения степени управляемости указывает на тенденцию создания простых приспособлений без механизации и автоматизации. Эта закономерность противоположена закону увеличения степени управляемости.
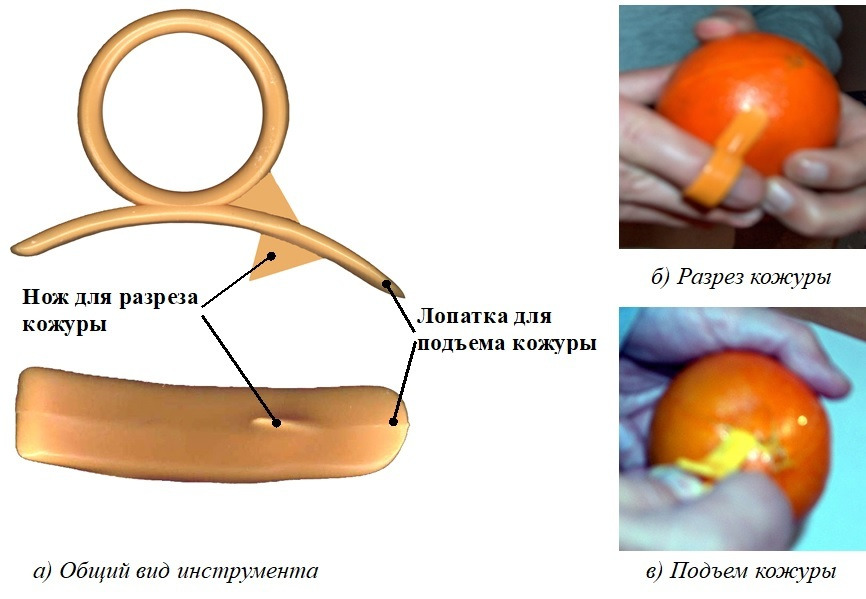
Пример 22.26. Инструмент для очистки апельсинов
Он представляет собой только одну деталь, отлитую из пластмассы (рис. 22.32). Инструмент одевается на палец. Полукруглая форма инструмента позволяет легко скользить по поверхности апельсина, а размер и форма ножа легко надрезает кожуру и не портит сердцевину. На конце сделана лопатка, помогающая приподнимать кожицу. Это очень простой, удобный и малогабаритный инструмент. Такого типа инструменты появлялись и в прошлом, например, различные приспособления для открывания консервов и бутылок. Они будут изобретаться и в будущем.
22.4. Закономерность увеличения степени динамичности
Развитие системы идет в направлении увеличения степени динамичности.
Динамичная система может изменять свои параметры, структуру (в частности форму), алгоритм, принцип действия и функции, чтобы наиболее эффективно достичь поставленную цель и удовлетворить потребность. Динамическая система в своем развитии может менять так же цель и потребность, приспосабливаясь к внешним и внутренним изменениям.
Изменения могут происходит:
— во времени;
— по условию.
Следствия из закономерности.
1. Статические системы стремятся стать динамическими.
2. Системы развиваются в сторону увеличения степени динамичности.
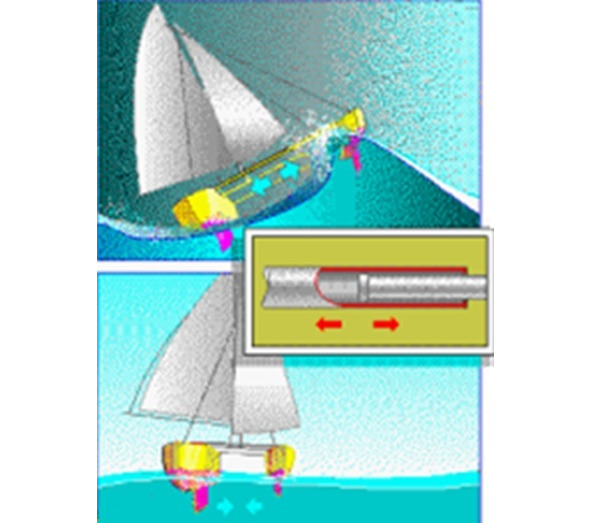
Пример 2.27. Катамаран
Парусные катамараны — суда с двумя корпусами, что повышает их устойчивость по сравнению с обычными однокорпусными яхтами.
Для увеличения маневренности расстояние между корпусами должно быть, как можно меньше, но это уменьшает остойчивость катамарана при большой волне.
Во время спокойной погоды корпуса катамарана должны быть на небольшом расстоянии, а при шторме — на большом расстоянии.
Корпуса должны иметь возможность раздвигаться и сдвигаться, — быть динамичным — изменяться в зависимости от состояния моря (штиль или волнение).
Соединение между корпусами сделали подвижное, которое может быть отрегулировано в зависимости от увеличенной маневренности (рис. 22.33).
Это пример изменения структуры по условию (высота волны). Статическая система стала динамической.
Приведем пример на увеличения степени динамичности.
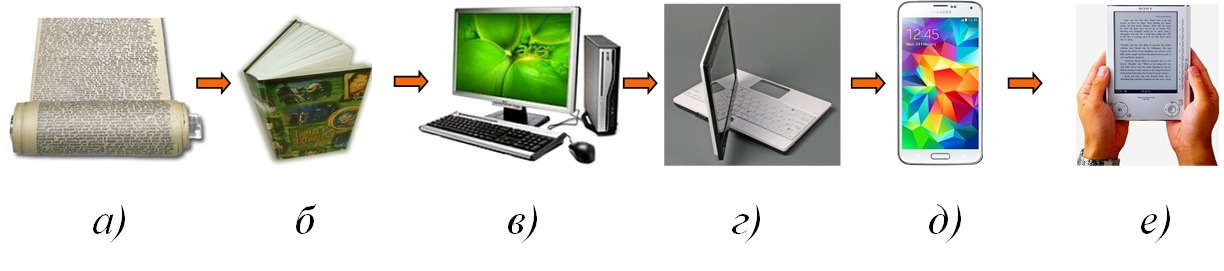
Пример 22.27. Электронная книга
Первоначально книга представляла собой свиток (рис. 22.34а), как правило, из папируса или пергамента.
В дальнейшем книги делались из отдельных листков, скрепленных вместе переплетом (рис. 22.34б). Их стало удобнее читать, и они занимали меньше места. Но книги используют бумагу, для получения которой необходимо уничтожать лес. Они много весят, занимают много места на полках и пылятся.
Далее книги стали переводить в электронный вид и читали с экрана компьютера (рис. 22.34в). Такие книги не использовали бумагу, занимали мало места и не пылились, в одном компьютере можно иметь большую библиотеку, но появились неудобства, связанные с процессом чтения, — не везде удобно читать с компьютера, например, в кровати. В дальнейшем появились лэптопы (рис. 22.34г), мини-компьютеры, планшеты и смартфоны (рис. 22.34д). Их легко переносить и читать удобно в любом месте. Смартфоны и планшеты сегодня получили наибольшее распространение.
Общий недостаток компьютеров — не все любят читать с экрана. Кроме того, чтение с экрана портит зрение, так как экран излучает свет, который непосредственно направлен в глаза.
Выпустили электронную книгу (e-book reader), в которую можно загружать много книг (рис. 22.34е).
Такие книги используют электронную бумагу (electronic paper), в которой используются электронные чернила. Электронная бумага отражает свет, так же как обычная книга, поэтому не портит зрение.
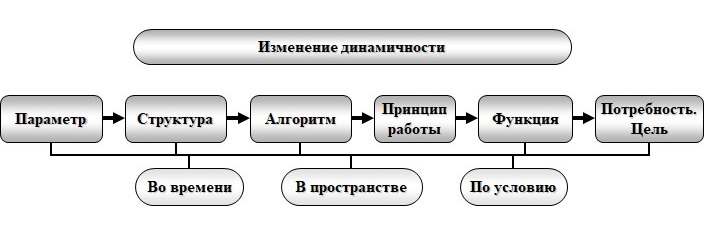
22.4.1. Основная линия увеличения степени динамичности
Увеличение динамичности происходит изменением динамичности параметров, структуры, алгоритма и принципа действия, функции, потребности и цели, которое может происходить во времени, в пространстве и по условию.
Степень динамичности увеличивается переходом от изменения динамичности параметров к изменению динамичности структуры, алгоритма, принципа действия, функции, потребности и цели.
Основная линия увеличения степени динамичности показана на рис. 22.35.
Изменение параметров системы — это наиболее простой способ увеличения степени динамичности системы с целью ее адаптации к внутренним и внешним изменениям.
Изменяться может любой параметр системы, например, электрические параметры (величина тока, напряжения, сопротивления и т. д.), оптические параметры (длина волны, яркость, освещенность и т. д.), акустические параметры (амплитуда и частота звука и т. п.), механические параметры (эластичность, жесткость, вязкость, число степеней свободы и т. д.) и т. д.
Пример 22.28. Оперативные запоминающие устройства — ОЗУ (RAM)
Оперативные запоминающие устройства — ОЗУ (RAM) созданы для хранения цифровой информации. Они работают, пока на микросхему подается питание. После отключения питания информация теряется.
В дальнейшем были созданы динамические ОЗУ (DRAM). С их помощью сократили время обмена информацией (запись и считывание). Динамические ОЗУ построены на электронных приборах с зарядовой связью. Информация хранится на паразитных конденсаторах (емкостях) транзисторов, как пакеты зарядов. Они обладают высокой скоростью обмена информации (пакетов зарядов), но не способны хранить ее длительное время (<1 ms).
Для решения этой проблемы в DRAM осуществляется непрерывная циклическая перезапись (обновление) информации.
Это пример изменения параметров во времени.
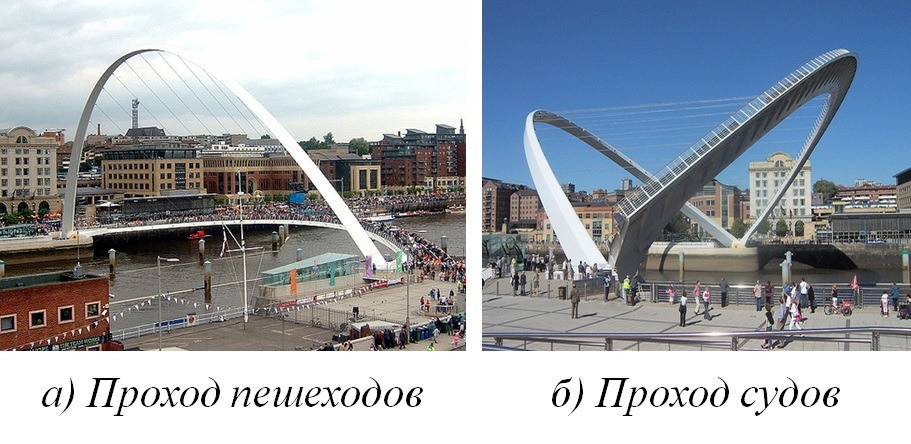
Пример 22.29. Мост Тысячелетия (Gateshead Millennium Bridge)
На южном берегу реки Тайн (River Tyne) в Англии, между городами Гейтшед (Gateshead) и Ньюкасл (Newcastle upon Tyne) был построен уникальный пешеходный и велосипедный мост тысячелетия.
Это первый в мире мост с использованием наклонного механизма для прохода кораблей.
Два полукруга конструкции напоминают веки, за это в народе мост называют «Моргающий глаз» (Blinking Eye). Когда по реке идут суда, мост приподнимает нижнее «веко» (рис. 22.36б). Все остальное время оно опущено (рис. 22.36а), и пешеходы легко перебираются с одного берега реки на другой.
Это пример изменения параметров по условию (проход судна).
Увеличение степени динамичности системы может осуществляться путем изменения структуры системы — это более сложный способ динамизации, чем изменение параметров.
Под изменением структуры мы понимаем и изменение формы объекта.
Пример 22.30. Автомобиль на поворотах
На крутых поворотах (рис. 22.37а) машину заносит, что может привести к аварии. Особенно это актуально для гоночных машин.
Как сделать машину более устойчивой на поворотах?
Шасси автомобиля делают динамичным. Подвеску делают с шарнирными связями. Автомобиль имеет возможность наклоняться на поворотах (рис. 22.37б).
Это пример изменения структуры по условию (перемещение по прямой или на поворотах).

Пример 22.31. Реактивный самолет
Подъемная сила самолета зависит от общей площади крыльев и скорости движения.
При малой скорости площадь крыльев должна быть большой, а при большой скорости большая площадь крыла создает лишнее сопротивление движению.
Если сделать реактивный самолет с малой площадью крыла, то он будет маневреннее и можно будет увеличить дальность полета, так как уменьшается сопротивление движению, а следовательно, будет затрачиваться меньше горючего. Однако малая площадь крыла требует увеличенной скорости полета при взлете и посадке, что увеличивает длину взлетно-посадочной полосы.
Как быть?
Во время взлета и посадки площадь крыла самолета должна быть большой, а во время полета — маленькой.
Крыло самолета должно менять свою площадь (большой и маленькой), — быть динамичной — изменяться в зависимости от скорости полета (посадка-взлет или полет).
Создан самолет с изменяемой геометрией крыла (изменяемой стреловидностью) (рис. 22.38).
Это пример изменения формы по условию (полет или взлет-посадка).

Увеличение степени динамичности системы может осуществляться путем изменения алгоритма работы.
Пример 22.32. Микросхемы
Многие современные приборы используют микросхемы. При создании новых приборов приходится или подбирать микросхему из выпускаемых промышленностью или разрабатывать и выпускать новую микросхему, что достаточно дорого стоит. Это оправдывается при массовом выпуске продукции. При проведении научных и опытно-конструкторских работ (НИОКР) и при выпуске единичных и мелкосерийных продуктов разработка и выпуск новых микросхем не выгодны и существенно влияют на себестоимость продукции.
Разработали программируемые логические интегральные схемы — ПЛИС (Field Programmable Gate Arrays — FPGA). В отличие от обычных цифровых микросхем логика работы ПЛИС не создается при изготовлении, а устанавливается посредством ее программирования.
ПЛИС представляет собой набор элементов, расположенных в виде матрицы. Между элементами расположены соединительные трассы, представляющие собой программируемые ключи, соединяющие необходимые блоки. Пользователь может создать нужную для него структуру, программируя определенную логику.
Таким образом, данная микросхема позволяет менять ее внутреннюю структуру и алгоритм работы в зависимости от функции, которую необходимо выполнять. ПЛИС можно перепрограммировать под новую функцию.
Это пример изменения структуры, алгоритма и функции по условию (принцип работы или изменение принципа работы).
Увеличение степени динамичности системы может осуществляться путем изменения ее принципа действия.
Пример 22.33. Обрабатывающий центр
Обрабатывающий центр — это станок с числовым программным управлением (ЧПУ), предназначенный для последовательного выполнения нескольких технологических операций различными инструментами по заданной программе. В качестве инструмента могут быть использованы: резец, фреза, сверло, плазма, лазер и т. п. При переходе к следующей операции станок меняет инструмент, а следовательно, и принцип действия, и алгоритм работы.
Это пример изменения структуры, алгоритма и принципа действия по условию (переход к другой операции).
Увеличение степени динамичности системы может осуществляться путем изменения выполняемой функции.
Пример 22.34. Мобильный телефон
Современный мобильный телефон выполняет много различных функций.
Это пример изменения алгоритма, принципа действия и функции по условию, выполняющего ту или другую потребность владельца.
Увеличение степени динамичности системы может осуществляться путем изменения потребностей.
Пример 22.35. Компьютер
Компьютер является наиболее развитой динамической системой. Трудно перечислить все функции, которые он выполняет и потребности, которые он удовлетворяет.
Это пример изменения алгоритма, функции и потребностей по условию (желание владельца).
Увеличение степени динамичности системы может осуществляться путем изменения целей.
Пример 22.36. Беспилотный самолет
Беспилотный самолет может изменить цель своего полета в зависимости от изменения обстоятельств. Например, перейти от наблюдения к боевым действиям.
Это пример изменения цели по условию.
22.4.2. Повышение динамичности
Система тем динамичнее, чем она более управляемая.
Динамичность системы повышается с увеличением скорости и точности адаптации к внешним и внутренним изменениям.
Скорость увеличения динамичности повышается с учетом изменений не только определенного параметра, а и его производных.
Идеально, когда система заранее готова к изменениям, т. е. имеет способность заранее прогнозировать изменения. С этой целью система должна использовать и/или выявлять и использовать тенденции, закономерности и законы развития системы, надсистемы и окружающей среды.
Точность адаптации может быть увеличена, если в законе управления системой учитывается интеграл от всех изменений или ведется учет предыдущих изменений.
Пример 22.37. Система управления
Системы управления для объектов с быстро изменяемыми параметрами должны управляться не только по самому сигналу, но и по его первой, второй или более высоким производным.
При длительной работе системы в закон управления желательно вводить интеграл управляемой величины для повышения точности управления.
22.4.3. Динамическая статичность
Статические системы достаточно устойчивы, но не мобильны. Мобильные системы часто неустойчивы. Для придания системе максимальной мобильности и устойчивости ее выполняют динамически статичной.
Динамическая статичность системы осуществляется за счет постоянного управления максимально мобильной системой.
Пример 22.38. Велосипед
Двухколесный велосипед устойчив только в процессе движения. Это динамическая устойчивость или динамическая статичность. Еще менее устойчив одноколесный велосипед.
Пример 22.39. Самолет — истребитель
Для обеспечения максимальной маневренности современные истребители делаются неустойчивыми (они не могут парить), а их устойчивость обеспечивается системой управления, подающей сигналы на рули и закрылки.
22.4.4. Тенденция уменьшения динамичности
В отдельных случаях можно говорить о тенденции уменьшения динамичности — повышения статичности. Система стремится сохранять, не изменять, стабилизировать свои параметры, структуру (в частности форму), алгоритм и принцип действия, функции, чтобы наиболее эффективно достичь поставленной цели и удовлетворить потребности. Кроме того, статичная система стремится сохранить также цели и потребности.
Стабилизация должна происходить во времени и/или в пространстве и/или по условию.
Название тенденции «уменьшение динамичности» условное. По существу, эта тенденция частный случай динамических систем, обеспечивающих постоянство параметра, структуры, функции, потребности, цели и т. д.
Динамическую статичность можно тоже рассматривать как частный случай тенденции уменьшения динамичности.
Пример 22.40. Сохранение традиций
Сохранение традиций — классический пример статической системы.
Большинство народностей стремятся сохранить свои национальные традиции.
Религии тщательно сохраняют свои традиции.
Компании сохраняют свои фирменные традиции.
Традиции передаются из поколения в поколение в семьях.
Это пример тенденции уменьшения динамичности на сохранение целей.
Пример 22.41. Функционирование живого организма
Постоянство функции живого организма обеспечивается регуляторными механизмами. Оптимальная регуляция обеспечивает гомеостаз организма.
И. М. Сеченов (1891) считал, что регуляторы могут быть только автоматическими. По современной терминологии такой вид регуляции называется саморегуляцией.
Явление саморегуляции подводит нас к такому понятию, как взаимодействие органов и тканей, а возможно и клеток между собой.
Это пример тенденции уменьшения динамичности на сохранение функций.
Другое направление — стабилизация формы.
Пример 22.42. Строительство
В строительстве используют монолитный железобетон, особенно это важно при возведении высотных зданий или опор мостов. Таким образом, конструкция получается монолитной.
Это пример тенденции уменьшения динамичности на стабилизацию формы (структуры).
Пример 22.43. Одноразовый стакан
Одноразовые стаканы делают из пластмассы. Стакан должен иметь определенную жесткость, чтобы он не смялся вовремя, когда его берут. В противном случае находящаяся в нем жидкость выльется. В связи с этим стенки стакана должны быть относительно толстые, но это приводит к излишнему расходу пластмассы, что удорожает себестоимость стакана.
В месте, где берутся за стакан, делаются канавки-гофры, кроме того, верхняя кромка стакана сделана в виде полутора, дно также укрепляет стакан, а внизу около дна имеются определенные впадины (рис. 22.39). Подобные решения применяют и в пластмассовых бутылках.
Это пример тенденции уменьшения динамичности на сохранение структуры (формы).

Существует много разновидностей систем, где необходимо поддерживать параметры стабильными (постоянными) — определенной величины. В качестве параметров можно указать, например, частоту, температуру, давление, натяжение, прочность и т. д.
Пример 22.44. Следящая система
Цель следящей системы — это обеспечение постоянства определенного параметра, за счет постоянной работой системы управления с отрицательной обратной связью.
Пример 22.45. Быстродействие запоминающих устройств
Быстродействие запоминающих устройств (жестких дисков, дискет, DVD) зависит от скорости их вращения. Чем выше скорость вращения, тем быстрее можно записать и считать информацию.
Идеально, чтобы запись и воспроизведение информации происходили без движения записывающего устройства. Эта проблема была решена с изобретением флеш-памяти.
Это пример тенденции уменьшения динамичности на сохранение параметра (движение). Отсутствующее движение.
Пример 22.46. Восстановление
Другое направление стабилизации — реставрация, восстановление и сохранение. Реставрация исторических памятников и предметов искусства, реабилитация больных, сохранение информации и т. д.
Тенденция уменьшения степени динамичности (увеличения статичности) используется для развития систем, в которых необходимо стабилизировать определенные параметры или всю систему в целом.
Для динамизации системы используется закономерность увеличения степени динамичности.
22.5. Направления изменения степени управляемости и динамичности
Общее направление изменения степени управляемости и динамичности определяется закономерностями:
— изменения степени вепольности;
— изменения управляемости веществом, энергией и информацией.
Структурная схема этих закономерностей показана на рис. 22.40.
Закономерность изменения управляемости веществом, энергией и информацией подразделяется:
— закономерность изменения управляемости веществом;
— закономерность изменения управляемости энергией и информацией.
Закономерность изменения управляемости веществом осуществляется тенденциями:
— использование «умных» веществ;
— изменения концентрации вещества;
— изменения степени дробления;
— перехода к капиллярно-пористым материалам;
— увеличения степени пустотности.
Закономерность изменения управляемости энергией и информацией осуществляется тенденциями:
— изменения концентрации энергии и информации;
— переход к более управляемым полям.

Глава 23. Закономерность изменения степени вепольности
Веполь — минимальная техническая система.
Г. С. Альтшуллер
«Развитие технических систем идет в направлении увеличения степени вепольности.
Г. С. Альтшуллер
23.1. Понятия вепольного анализа
Закономерность изменения степени вепольности является следствием закономерности изменения степени управляемости и динамичности, относящийся к группе закономерностей эволюции систем (рис. 23.1).

Структурный вещественно-полевой (вепольный) анализ — раздел ТРИЗ, изучающий и преобразующий структуру технических систем. Вепольный анализ разработан Г. Альтшуллером.
Представим определения Г. Альтшуллера.
Веполь — минимальная техническая система.
«Развитие технических систем идет в направлении увеличения степени вепольности.
Смысл этой закономерности заключается в том, что невепольные системы стремятся стать вепольными, а в вепольных системах развитие идет в направлении перехода от механических полей к электромагнитным; увеличения степени дисперсности веществ, числа связей между элементами и отзывчивости системы».
Далее будут представлены определения автора.
Вепольный анализ — это специальный язык схем, позволяющий представить исходную систему в виде определенной (структурной) модели. С помощью специальных правил выявляются свойства этой системы. Затем по специальным закономерностям преобразовывают исходную модель задачи и получают структуру решения, которое устраняет недостатки исходной системы.
Статистический анализ решений показал, что для повышения эффективности систем их структура должна быть выполнена определенной. Модель такой структуры называется веполем.
Веполь — это модель минимально управляемой системы, состоящей из двух взаимодействующих объектов и энергии их взаимодействия.
Взаимодействующие объекты условно названы веществами и обозначаются В1 и В2, а само взаимодействие называется полем и обозначается П. Поле может представлять собой энергию, силу или информацию.
Подробнее о вепольном анализе можно прочитать в учебном пособии.
23.2. Закономерность увеличения степени вепольности
Закономерность увеличения степени вепольности заключается в том, что любая система в своем развитии стремится стать более вепольной, т. е. должна повышаться степень вепольности.
Ниже будет представлена закономерность увеличения степени вепольности в усовершенствованном автором виде.
Закономерность включает тенденции, описывающие последовательность изменения структуры и элементов (веществ и полей) веполей с целью получения более управляемых технических систем, т. е. более идеальных систем. При этом в процессе изменения необходимо осуществлять согласование веществ, полей и структуры.
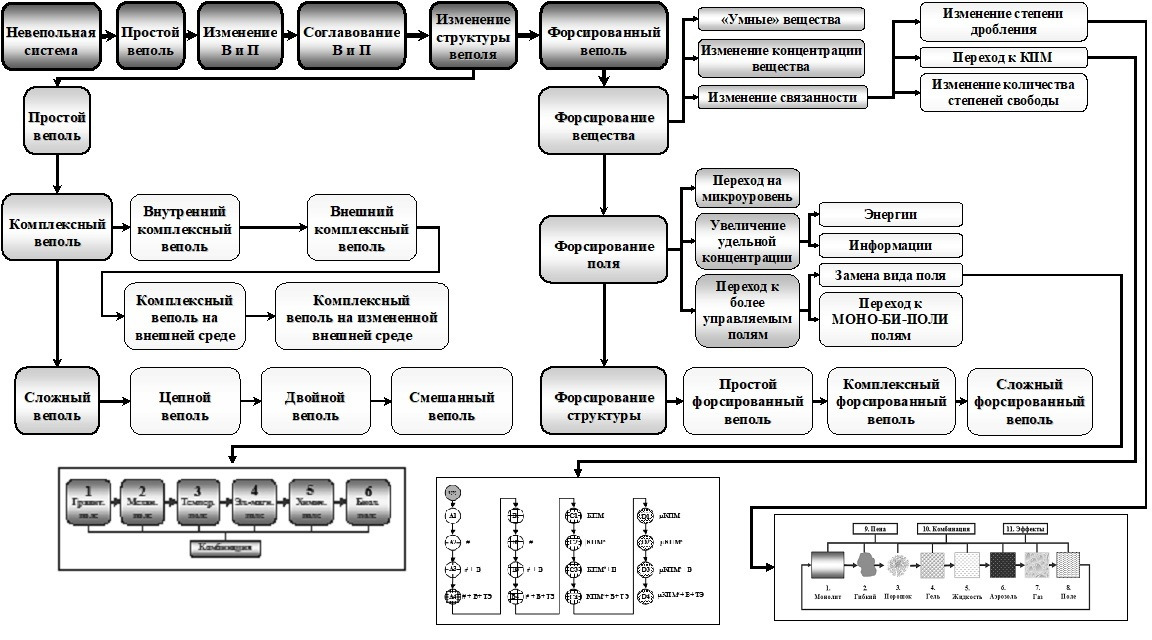
Общая тенденция развития веполей (рис. 23.2) представляет собой переходы: от невепольной системы к простому веполю; на следующем этапе происходит изменение и последующее согласование веществ и полей; затем изменение структуры веполя; и, в конце концов, переход к форсированному веполю.
Форсированный — это максимально управляемый веполь.
Таким образом, в тенденциях развития веполей можно выделить тенденцию построения веполей. Другие тенденции вепольного анализа рассматривают преобразование веполей с целью повышения эффективности технических систем или ликвидации в них вредных связей. Они являются следствием закона увеличения степени вепольности технических систем. При преобразовании в веполях могут изменяться составляющие (вещества и поля) и структура. Эти изменения могут осуществляться частично или полностью, в пространстве и во времени.
Общая тенденция представлена на рис. 23.2–23.6.
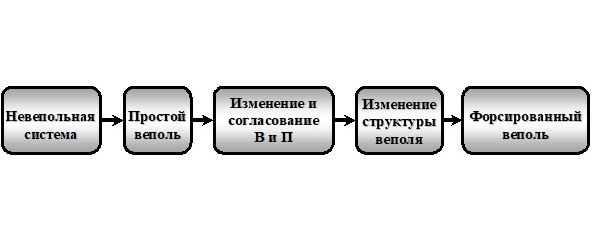

Первая тенденция развития веполей — достройка (построение) веполей, т. е. переход от невопольной к вепольной системе. В результате получаем простой веполь (рис. 23.2).
Изменение веществ (В) и полей (П) начинается с подбора или вещества «отзывчивого» на имеющееся поле или поля «отзывчивого» на имеющееся вещество или «отзывчивой» пары (вещество-поле). Подбирая «отзывчивые» вещества и поля мы осуществляем их согласование.
Приведем примеры «отзывчивых» веществ и полей.
1. Ферромагнитное вещество отзывчиво на магнитное поле.
2. Пьезовещество отзывчиво на давление, колебание, вибрацию (механическое поле).
3. Материал с памятью формы отзывчив на тепловое поле.
4. Флуоресцентные и фоточувствительные вещества отзывчивы на оптическое поле.
5. Жидкие кристаллы отзывчивы на электрическое и тепловое поле и т. д.
Практически после построения веполя целесообразно подобрать другие, более подходящие вещества или поля, и после их замены согласовать вновь введенные вещества с имеющимися элементами.
Иногда этого достаточно для повышения эффективности системы.
Дальнейшее развитие системы идет путем изменения структуры и использования форсированных веполей. После каждого изменения необходимо делать согласование.
Рассмотрим более подробно отдельные тенденции построения и развития веполей.
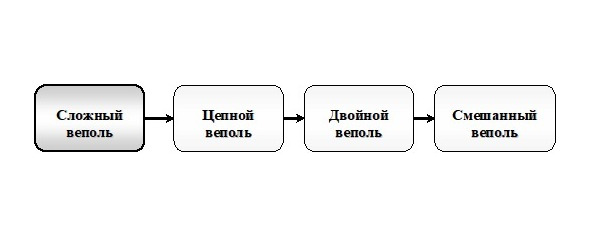
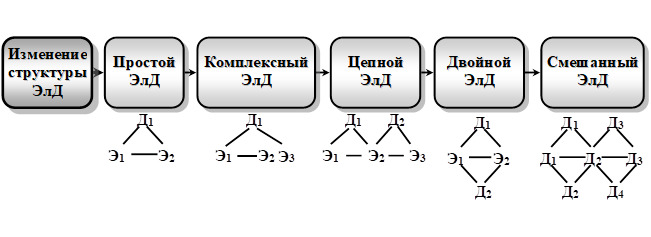
Тенденция изменения структуры веполя (рис. 23.3) представляет собой переход от простого веполя к комплексному и от комплексного к сложному веполю. Это осуществляется в первую очередь за счет увеличения числа связей между элементами и их количества.
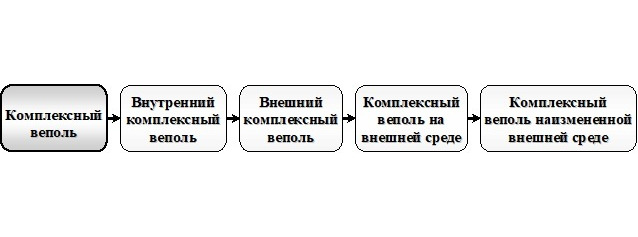
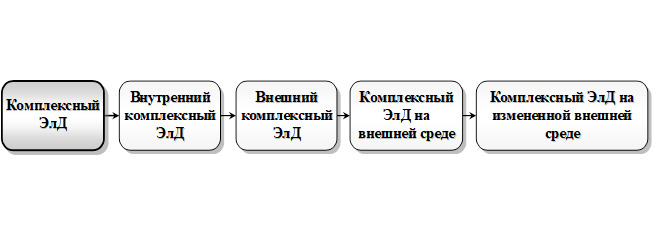
В свою очередь тенденция развития комплексного веполя (рис. 23.4) представляет собой переход от внутреннего комплексного веполя к внешнему комплексному веполю и к комплексному веполю на внешней среде.
Эта тенденция обусловлена, прежде всего, тем, что добавки значительно легче вводить не внутрь системы, а прикреплять ее снаружи или еще легче вводить в окружающую среду. Кроме того, такую добавку легко удалить или заменить при необходимости.
Тенденция развития сложного веполя (рис. 23.5) представляет собой переход от цепного веполяк двойному и смешанному веполям.
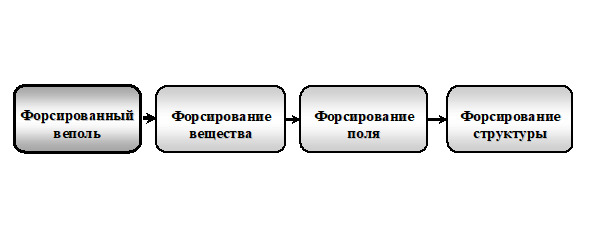
Наивысшим этапом повышения управляемости веполей является переход к форсированным веполям (рис. 23.6). Форсировать можно вещество, поле и структуру.
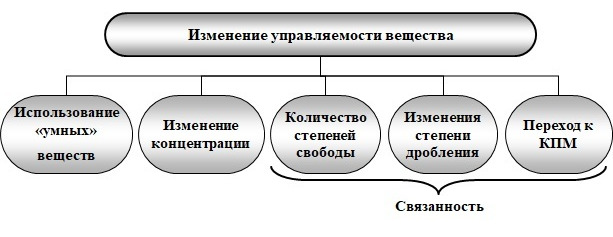
Форсирование вещества подчиняется закономерности изменения управления веществом (рис. 23.6).
Напомним, что закономерность изменения управляемости вещества осуществляется тенденциями (рис. 23.7):
— использование «умных» веществ;
— изменение концентрации вещества;
— изменение степени дробления;
— изменение количества степеней свободы;
— переход к капиллярно пористым материалам (КПМ).
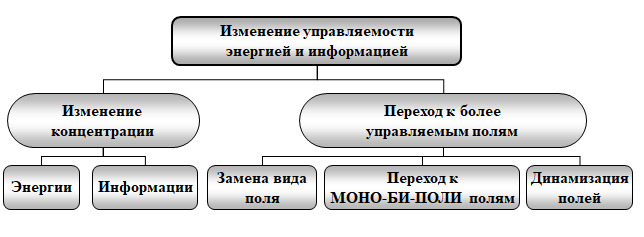
Форсирование поля подчиняется закономерности изменения управляемости энергии и информации (рис. 23.8).
Изменение управляемости энергией и информацией осуществляется за счет тенденций (рис. 23.8):
● изменение концентрации:
— энергии;
— информации;
● переход к более управляемым полям:
— замена вида поля;
— переход к моно-, би-, полиполям;
— динамизация полей.
Форсирование структуры веполя подчиняется закономерности изменения структуры веполя (рис. 23.3) с учетом форсированных веществ и форсированных полей.
Рассмотрим общую схему закона увеличения степени вепольности (рис. 23.9).
23.3. ОБЩАЯ СХЕМА ЗАКОНА УВЕЛИЧЕНИЯ СТЕПЕНИ ВЕПОЛЬНОСТИ
23.4. Уменьшение степени вепольности
Закономерность уменьшения степени вепольности нацелена на использование монолитного вещества и простейших полей, например, гравитационного или механического.
Это могут быть объекты, состоящие или только их одного вещества или только из одного поля.
Прежде всего, это может относиться к простейшим вещам, состоящим из одной детали. Например, предметы, отлитые из пластмассы или металла, сделанные из единого (монолитного) куска материала или использование ресурсов природы, как в виде веществ, так и в виде поля (энергии и информации).
В качестве примеров можно назвать предметы домашнего обихода, например, вешалки для белья, кухонные приборы, некоторые инструменты, одноразовые предметы и т. д.
23.5. Вепольный анализ для информационных систем
В информационных системах и особенно в программировании не существует веществ и полей.
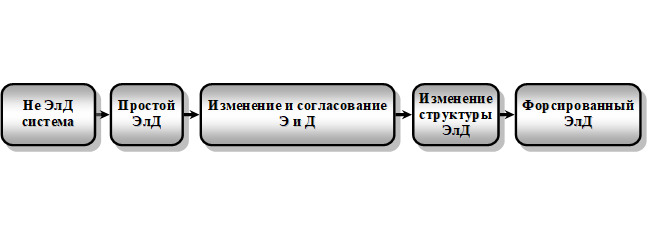
В связи с этим вещество (В) мы переименовали в элемент и обозначили буквой Э, или на английском буквой E (Element), поле –действие и обозначили Д, или на английском буквой A (Action). Тогда веполь мы будем называть ЭлД или на английскомEl-Action.
Закономерность увеличения степени ЭлДа (El-Action) представлен на рис. 23.10 –23.13.

23.6. Новый подход к вепольному анализу
23.6.1. Новая структура веполя
Общие понятия
Вводится новая структура веполя или ЭлД (на английском El-Action). Кроме элементов и действий, вводится еще один компонент — знание.
Новая структура включает «элемент (Эл), на английском Element (E)», «действие (Д), на английском Action (A)», и «знания (З), на английском Knowledge (K)».
Модель, включающую элемент, действие и знание, будем называть ЭлДЗ (на английском EAK). Методику анализа и преобразования ЭлДЗ будем назвать ЭлДЗ анализ.
Возможны следующие этапы учета знаний (З) в системе.
1. Знания вне системы. Не ЭлДЗ система.
2. Частичные знания водятся при проектировании системы. Остальные необходимые знания находятся вне системы (в надсистеме).
3. Все необходимые знания вводятся в систему. Управление знаниями находится вне системы (в надсистеме).
4. Управление знаниями осуществляется в системе.
Пример 23.1. Сверление отверстия
Необходимо просверлить отверстие в детали.
1. Знания (З) вне системы.
Сверлят вручную. Действие (Д) — это вращение. Оно действует на элемент (Э) — сверло. Знания (З) вне системы. Они находятся у рабочего. Он знает, где необходимо просверлить отверстие и как его сверлить.
2. Частичные знания в системе.
Делается специальное приспособление (кондуктор) для сверления отверстия. Рабочему не нужно не только делать разметку места сверления, но и кернить. Эти знания уже заложены в систему в виде приспособления.
Знание (З) управляет действием (Д), которое воздействует на элемент (Э). Знания, как делать отверстие (технология изготовления) — вне системы (у рабочего). Пунктирная стрелка обозначает, что используется частичные знания.
3. Все знания о процессе в системе.
Станки с числовым программным управлением (ЧПУ) имеют все необходимые знания для осуществления технологии изготовления изделия. Управление этими знаниями — программирование — вне системы. Управление знаниями выполняются оператором.
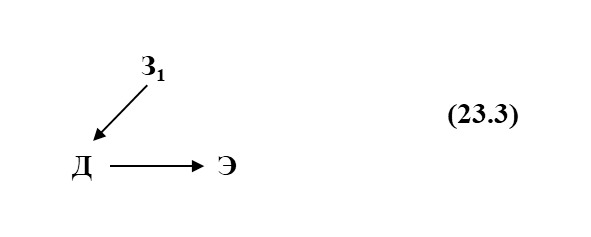
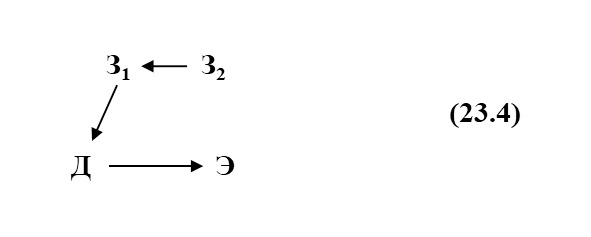
4. Управление знаниями осуществляется в системе.
Программирование (З2 — знание, управляющее знаниями З1) должно осуществляться в самом станке. Это следующий этап развития.
Этапы 2 — 4 (частичные знания в системе, все знания о процессе в системе, управление знаниями осуществляется в системе) могут быть в общем виде описаны более сложными схемами, чем модели (23.2) — (23.4).
Элемент (Э) может первоначально содержать какие-то знания (З). Для управления элементом (Э), часто необходимо знание (З) о его состоянии. Это знание учитывается при проектировании, заранее подстраивая действие под данное состояние. При работе системы не учитывается изменение состояния элемента. Действие всегда одинаково.
Тогда модель (23.2) можно представить так:
где З1 — знание о состоянии элемента Э. Это знание З1 изменяет действие Д в зависимости от состояния элемента Э. Пунктирные стрелки означают, что знание о состоянии элемента введено заранее.
На этапе 3, если состояние элемента (Э) контролируется, т. е. система постоянно получает информацию о состоянии элемента, то модель (23.3) может быть представлена так:
Этот случай характерен для любых самонастраивающихся систем.
Пример 23.2. Самонаводящаяся ракета
С помощью головки самонаведения, расположенной в носовой части ракеты, получаются данные о координатах цели, направлении и скорости ее передвижения.
Эти данные передаются в систему автоматического управления ракетой, которая направляет ракету в нужном направлении и с нужной скоростью.
Этап 4 при контролировании состояния элемента (Э) может быть представлен, например, так:
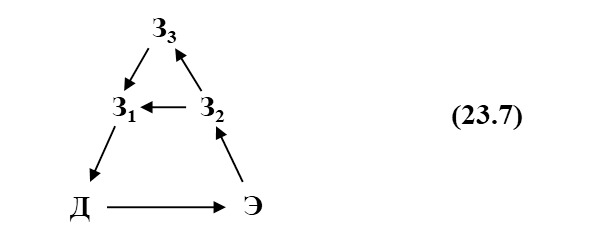
где
З1 — знание, управляющее действием (Д);
З2 — знание о состоянии элемента (Э);
З3 — знание, управляющее знаниями (З1).
Пример 23.3. Самонаводящаяся ракета
В примере 23.2 с самонаводящейся ракетой З3 может представлять собой, например, изменение цели, отмену действия или самоуничтожение и т. д.
Пример 23.4. Изготовления шоколада
Рассмотрим процесс изготовления шоколада.
1. Знания (З) вне системы.
Сначала процесс осуществлялся человеком вручную. Он знал весь процесс. Выбирал необходимые бобы какао, жарил их и молол до нужной консистенции. Таким образом, знания о процессе изготовления шоколада были только в голове работника, т. е. знания не присутствовали в системе.
2. Частичные знания в системе.
На следующем этапе делались простейшие механизмы и машины. Они уже включали определенные знания, например, как размельчать бобы какао, — была создана мельница. Это этап частичного включения знаний в систему. Далее процесс все более автоматизировался. В систему вносили все большие знания.
3. Все знания о процессе в системе.
Создали полностью автоматизированную систему. В систему внесли все необходимые знания для изготовления определенного вида шоколада.
4. Управление знаниями осуществляется в системе.
На следующем этапе в систему изготовления шоколада необходимо ввести управление знаниями изготовления шоколада.
Например, система будет адаптироваться и изменять процесс для различных сортов какао и конкретно под бобы, имеющиеся в системе. Система будет изучать процесс изготовления шоколада и улучшать его. Система будет сама перестраиваться под различные сорта шоколада. Система будет создавать новые рецепты шоколада и саморазвиваться. Система будет создавать подобные себе системы.
Учет знаний и закономерностей их развития — это современные тенденции развития техники. Особенно важно их учитывать при развитии информационных технологий.
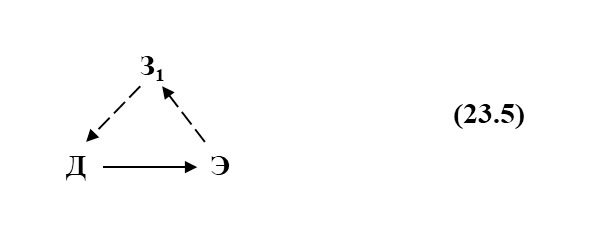
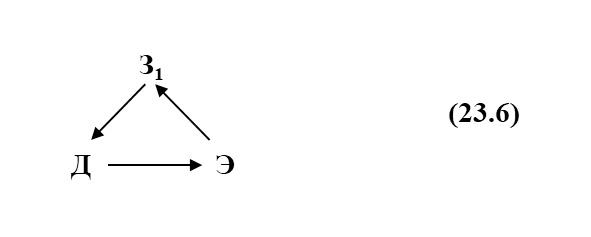
Часто веполь изображают в виде треугольника. Аналогично можно представить и ЭлД. Тогда ЭлДЗ в общем виде можно изобразить так:
Учет знаний и закономерностей их развития — это современные тенденции развития техники. Особенно важно их учитывать при развитии информационных технологий.
Часто веполь изображают в виде треугольника. Аналогично можно представить и ЭлД. Тогда ЭлДЗ в общем виде можно изобразить так:
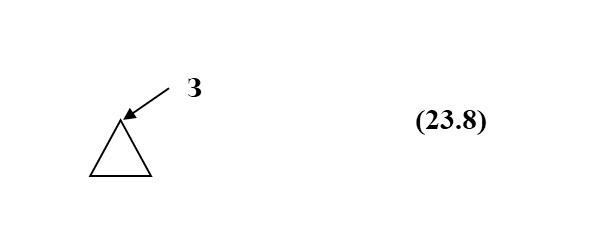
Таким образом, вепольный и ЭлД анализ являются частными случаями ЭлДЗ анализа, при условии, что знания не учитываются или не рассматриваются при анализе и синтезе системы.
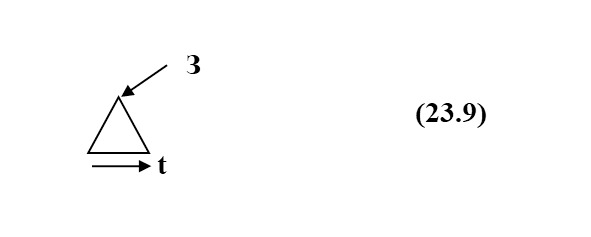
Для полноты картины необходимо учитывать изменения элементов (Э), действий (Д) и знаний (З) во времени, т. е. их динамизацию. Схематично это изобразим в виде стрелки с буквой t (время).
23.6.2. Параметрический анализ
Для полноты картины необходим учет всех параметров составляющих компонентов (элемента, действия и знаний).
Данные об элементе
В качестве данных об элементе можно рассматривать:
1. Структуру;
2. Свойства;
3. Изменения во времени.
Структура элемента
Под структурой элемента понимается:
— Внутреннее строение и/или состав;
— Форма;
— Агрегатное состояние с учетом цепочки дробления (рис. 24.5).
Структура зависит от самого элемента.
Пример 23.5. Структура технической системы
Для технических элементов это может быть, например, конструкция (устройство) элемента, его состав (пластмасса, металл, «умное» вещество, например, материал с эффектом памяти формы, чип и т. д.). Форма элемента и его агрегатное состояние (твердый, жидкий, газообразный, плазма).
Пример 23.6. Структура организационной системы
Для организационных систем, например, структура компании или подразделения.
Пример 23.7. Структура бизнес-системы
Для бизнес-системы, например, структура и состав бизнеса, какой-то сделки и т. д.
Пример 23.8. Структура информационной системы
Для информационных систем — это может быть структура элемента, вид информации и ее параметры и т. д.
Свойства элемента
Описываются все свойства и параметры элемента.
Это могут быть:
— технические свойства, включая вес и габариты;
— экономические характеристики;
— эстетические характеристики;
— эргономические характеристики;
— экологические характеристики;
— психологические характеристики;
— и т. п.
Изменения во времени
Учитывает изменяется ли элемент во времени и характеристики изменения, т. е. элемент динамичный или статичный и характеристики динамичности.
Данные о действии
В качестве данных об элементе можно рассматривать:
1. Вид действия;
2. Градиент действия (grad Д).
Вид действия
Любое действие, воздействие и взаимодействие любой природы:
1. Потоки:
— вещества;
— поля;
— информации.
2. Силы;
3. Энергия;
4. и т. д.
Градиент действия
Градие́нт (от лат. gradiens, род. падеж gradientis — шагающий, растущий) — вектор, своим направлением указывающий направление наибольшего возрастания некоторой величины ψ, значение которой меняется от одной точки пространства к другой (скалярного поля), а по величине (модулю) равный скорости роста этой величины в этом направлении.
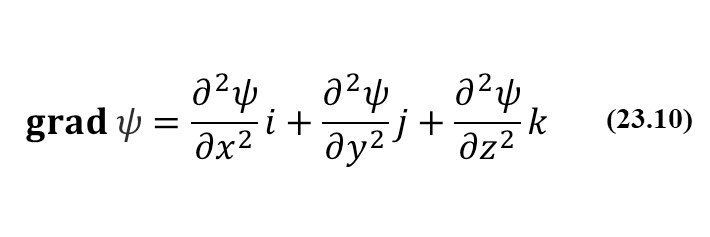
Градиент — вектор, своим направлением указывающий направление наискорейшего возрастания некоторой величины ψ. Другими словами, направление градиента есть направление наибыстрейшего возрастания функции.
Учитывая, что величина, с которой мы имеем дело, — это действие (Д), формулу (23.10) можно представить
Таким образом, для действия указывается его:
— направление:
— сила;
— скорость.
В некоторых случаях нужно указывать более высокие производные и интеграл действия.
Данные о знании
Сначала дадим некоторые определения.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.