

1. Введение
Гравиполи — это тенденции увеличения управляемости гравитационного поля тенденции, учитывающие способы управления веществом с помощью гравитационного поля и «управления» полем.
Под гравитационным полем в данной работе будем понимать силы гравитации, тяжести и вес тела. Под управлением будем понимать их увеличение или уменьшение.
Гравиполи можно использовать для осуществления и других действий, например, создания движения, силы, выработки и накопления энергии, удержания тела в определенном положении, повышения статической устойчивости, устранения вибрации, образования пленки, измерения и обнаружения различных параметров и т. п.
Первоначально мысли о разработке тенденции «управления» весом возникли у автора в начале 70-х годов при знакомстве с приемами разрешения технических противоречий, разработанных Г. С. Альтшуллером. Прием 8 «Принцип антивеса» непосредственно описывает способы управления весом. В сентябре 1973 г. автор послал первый вариант наброска работы (отдельные линии и примеры) Г. С. Альтшуллеру и он, резонно сказал, что работа еще «сырая». Вторично к данной работе автор вернулся в середине 1980 г. познакомившись с тенденциями развития теполей и феполей, разработанными
Г. С. Альтшуллером. К этому времени автор понял, что таким образом должны быть представлены закономерности развития по любому из полей. Автор неоднократно пытался дать эту тему своим ученикам, но, к сожалению, никто так и не выполнил эту работу. Первый вариант практически завершенной работы был сделан в сентябре 1989 г., но он не удовлетворил автора, и работа была приостановлена и завершена в декабре 1989 г.
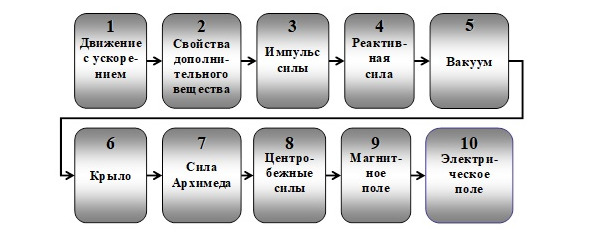
Основная линия развития гравиполей показана на рис. 1.1.
2. Основные физические принципы
Для лучшего понимания материала напомним общеизвестные физические истины.
Сила тяготения описывается формулой (2.1)
Где
F — сила тяготения;
G — гравитационная постоянная;
m1, m2 — массы тел;
r — расстояние между телами.
Сила тяжести описывается формулами (2.2) и (2.3)
Где
Fт — сила тяжести;
G — гравитационная постоянная;
M — масса Земли;
m — масса тела на поверхности Земли;
g — ускорение свободного падения;
R — радиус Земли.
Вес тела — это сила, действующая на опору или подвес (которые удерживают тело от свободного падения вследствие тяготения Земли). Вес тела, покоящегося в инерциальной системе отсчета, совпадает силой тяжести и описывается формулой (2.5)
Где
P — вес тела;
m — масса тела;
g — ускорение свободного падения.
Покажем возможности изменения веса тела.
1. Опора неподвижна или движется равномерно
Вес определяется по формуле (2.5)
2. Опора движется с ускорением
Где
P — вес тела;
m — масса тела;
g — ускорение свободного падения;
a — ускорение движения тела.
2.1. Ускорение направлено вверх — перегрузка.
При этом формула веса будет иметь вид (2.6)
2.2. Ускорение направлено вниз — уменьшение веса.
Формула веса имеет вид (2.7)
3. Тело движется по окружности в вертикальной плоскости

Где
P — вес тела;
m — масса тела;
g — ускорение свободного падения;
V — скорость движения тела;
r — радиус окружности.
3.1. Тело находится в нижнем положении
Формула веса имеет вид (2.8)

3.2. Тело находится в верхнем положении
Формула веса имеет вид (2.9)

4. Тело находится в различных средах
Формула веса имеет вид (2.10)
Где
P — вес тела;
Fa — сила Архимеда;
m — масса тела;
g — ускорение свободного падения.
Где
Fa — сила Архимеда;
ρ — удельная плотность среды (жидкости или газа);
V — объем тела.
Сила Архимеда проявляется, когда тело непосредственно находится в среде.
5. На тело воздействует сила, увеличивающая или уменьшающая вес
3. Управление полем
3.1. Управление силой тяготения
В соответствии с формулой (2.1) силой тяготения можно управлять, изменяя массы тел или расстояние между ними.
Пример 3.1. Космический корабль
При значительном отдалении космического корабля от планеты на ракету почти не действует сила тяготения.
3.2. Управление силой тяжести
Силой тяжести, описанной формулами (2.2), (2.3), (2.4), можно управлять, изменяя массу тела и ускорение свободного падания.
Ускорение свободного падения «g» зависит от:
— высоты расположения тела над Землей;
— широты места;
— пород земной коры.
Пример 3.2. Навигационные приборы
В навигационных приборах вводят поправки от выше указанных параметров.
3.3. Управление весом
Управление весом можно осуществлять, изменяя массу тела и ускорение свободного падания, а, также создавая дополнительную силу, которая в зависимости от направления будет увеличивать или уменьшать вес.
По второму закону Ньютона сила описывается формулой (3.1).
Дополнительная сила может быть любой природы.
Далее в этом разделе опишем возможные способы «управления» весом.
3.3.1. Движение с ускорением
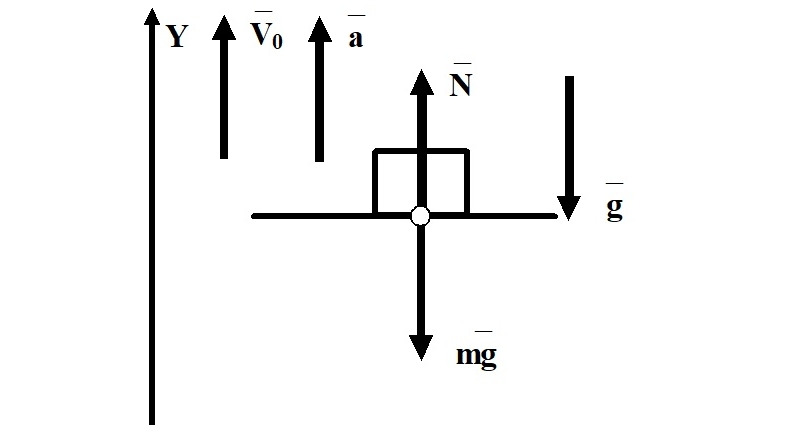
3.3.1.1. Ускорение направлено вверх
Ускорение направлено в сторону противоположную весу, т. е. создается перегрузка («увеличение» веса) в соответствии с формулой (3.2).
Это возможно в двух случаях:
— вектор скорости движения совпадает по направлению с вектором ускорения
— вектор скорости движение противоположен вектору ускорения
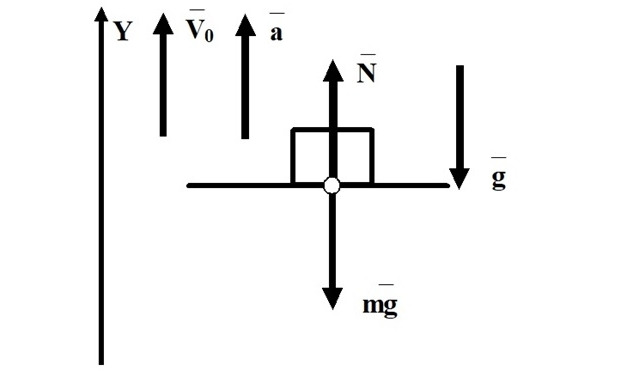
3.3.1.1.1. Скорость движения совпадает по направлению с ускорением
Диаграмма сил показана на рис. 3.1.
Пример 3.3. Перегрузки
Старт космической ракеты или резкий набор высоты в самолете. При этом космонавт или летчик испытывают большие перегрузки (рис. 3.2).

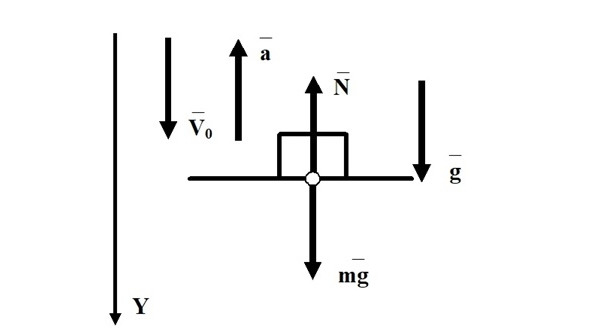
3.3.1.1.2. Скорость движения противоположна по направлению ускорению
Диаграмма сил показана на рис. 3.3.
Пример 3.4. Спуск космического корабля на Землю
Происходит резкое торможение, и создаются перегрузки.
Пример 3.5. Движение по окружности
Движение по окружности: летчик «в пике», движение по вогнутой поверхности, допустим мосту, тренировка космонавтов в центрифуге. Создаются перегрузки.
3.3.1.2. Ускорение направлено вниз
Этот случай «уменьшения» веса вплоть до невесомости. Он описывается формулой (3.3).
Здесь, как и в предыдущем случае возможны два варианта:
— вектор скорости движения совпадает по направлению с вектором ускорения
— вектор скорости движение противоположен вектору ускорения
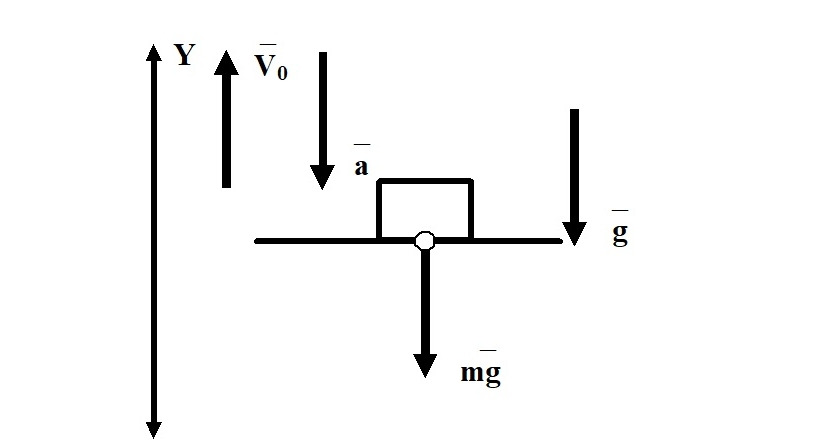
3.3.1.2.1. Скорость движения совпадает по направлению с ускорением
Диаграмма сил показана на рис. 3.4.
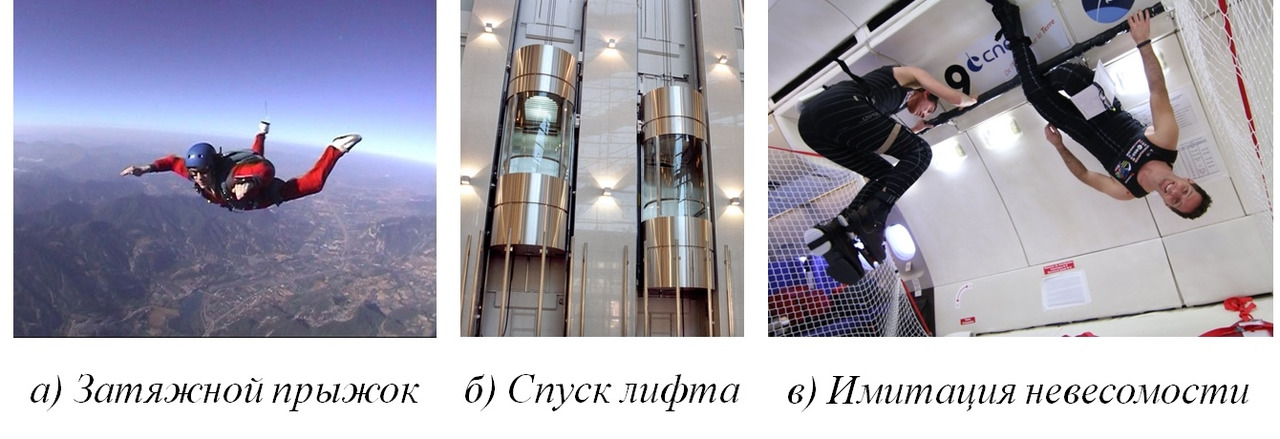
Пример 3.6. Невесомость
Свободное падение: затяжной прыжок с парашютом (рис. 3.5а), движение лифта вниз (рис. 3.5б) и т. п. Наверное, каждый испытывал хоть ненадолго ощущение невесомости при падении, прыжках или резком опускании вниз, в воздушных ямах и т. п. Для имитации ощущения невесомости в земных условиях космонавты тренируются в специально оборудованных самолетах, движущихся вниз с большой скоростью по параболе (рис. 3.5в).
3.3.1.2.2. Скорость движения противоположна по направлению ускорению
Диаграмма сил показана на рис.3.6.
Пример 3.7. Невесомость
Если ракета или самолет, набирающий высоту резко «затормозит», то человек, находящийся в летательном аппарате почувствует невесомость.
3.3.2.Создание дополнительной силы
В качестве таких сил могут использоваться вес тела, упругие свойства материалов, импульсы силы, реактивные силы, вакуум, набегающий поток и крыло, центробежные силы, силы Архимеда, магнитное поле и т. д.
3.3.2.1. Дополнительная масса
Пример 3.8. Дорожный каток
Масса дорожного катка должна быть как можно больше, чтобы делать дорожное покрытие как можно прочнее, но при транспортировке катка на место тратится лишняя энергия.
Это противоречие разрешается во времени. Чтобы избежать лишних затрат энергии, было предложено перевозить пустой барабан — каток, а на месте его заполняют водой, засыпают песком до достижения необходимого груза.
В патенте России 2 412 306 корпус катка выполнен из множества секций, расположенные по окружности вокруг центральной оси. Секции закачивают воду, которая насосами перекачивается из секции в секцию.
Пример 3.9. Саморазгружающаяся баржа
В гидростроительстве при перекрытиях русел рек и разного рода отсыпках под воду используют саморазгружающиеся (опрокидывающиеся) баржи, в частности баржи, показанные на рис.3.7. Они состоят из двух отсеков плавучести 1 и 2 («нос» и «корма»), которые держат баржу на плаву. Между отсеками плавучести находится грузовой трюм 3, выполненный в виде трехгранной призмы. Стенки трюма имеют отверстия, в трюм всегда проходит вода (без этого трудно было бы опрокидывать баржу и возвращать ее в исходное положение). Вдоль корпуса с обеих сторон расположены воздушные полости 4. Нижняя часть этих полостей открыта. Когда баржу нагружают, она оседает, вода поджимает воздух в воздушных полостях. Когда надо произвести разгрузку баржи, открывают кран 5, воздух выходит, вода заполняет одну бортовую полость, баржа опрокидывается. После того как груз высыпался, вращающий момент, создаваемый килем 6, автоматически возвращает баржу в исходное положение.
Такие баржи решено было использовать на строительстве Асуанской плотины. В силу специфических условий потребовалось создать баржи грузоподъемностью 500 т. с низкой осадкой, то есть более широкие и плоские. Построили модель баржи и обнаружили, что модель не возвращается в исходное положение.
Чтобы возвратить баржу в исходное положение, необходимо было делать киль тяжелее, но тогда придется все время возить «мертвый» груз. Чем тяжелее киль, тем меньше полезная грузоподъемность баржи.
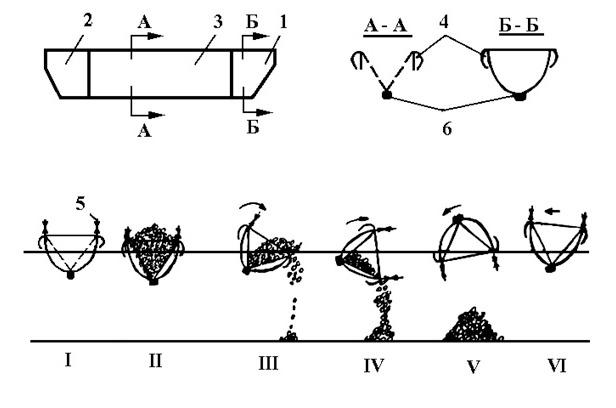
1 и 2 — плавучие отсеки; 3 — грузовой трюм; 4 — воздушная полость; 5 — кран; 6 — киль.
Бесплатный фрагмент закончился.
Купите книгу, чтобы продолжить чтение.